
超音波モーターは、1965年にV.VLavrinkoによって発明されました。一般に、従来のモーターでは、原動力が電磁場によって与えられるという事実を認識しています。しかし、ここで原動力を提供するために、これらのモーターは 超音波の圧電効果 周波数範囲は20kHz〜10 MHzで、通常の人間には聞こえません。したがって、それは圧電USM技術と呼ばれます。超音波技術は、コンポーネントからの超音波振動力を操作に利用するUSMによって使用されます。

超音波モーター
このテクノロジーについて詳しく説明する前に、 超音波センサー 、圧電センサーおよび圧電アクチュエータ。
圧電センサー

ひずみ、力、応力、加速度などの物理量の変化は、これらを電気エネルギーに変換することで測定できます。このプロセスに使用されるデバイスまたはセンサーは、圧電センサーと呼ばれます。そして、このプロセスは、 圧電効果 。結晶に電圧をかけると、結晶の原子に圧力がかかり、原子の変形はわずか0.1%になります。
超音波センサー

超音波センサー
高周波(約20 kHz〜10 MHzの音波の周波数)を生成し、信号の送信後にエコーを受信する間の時間間隔を読み取ることによってターゲットを特定するトランスデューサーは、超音波センサーと呼ばれます。したがって、 超音波センサーは障害物の検出に使用できます 衝突を避けるために。
圧電アクチュエータ

カメラ、ミラー、工作機械、その他の同様の機器のレンズを微調整するには、正確な動きの制御が必要です。この正確な動きの制御は、圧電アクチュエータによって実現できます。電気信号は、圧電アクチュエータを使用して正確に制御された物理的変位に変換できます。これらは、油圧バルブと専用モーターの制御に使用されます。
圧電超音波モーター技術
単純に、超音波技術を圧電効果の逆と呼ぶことができます。この場合、 電気エネルギー モーションに変換されます。したがって、これを圧電USMテクノロジーと呼ぶことができます。
チタン酸ジルコン酸鉛および石英という名前の圧電材料は、圧電アクチュエータがUSMとは異なりますが、USMおよび圧電アクチュエータにも非常に頻繁に使用されます。ニオブ酸リチウムやその他の単結晶材料などの材料も、USMや圧電技術に使用されています。
圧電アクチュエータとUSMの主な違いは、回転子と接触している固定子の振動として示され、共振を使用して増幅することができます。アクチュエータの動きの振幅は20〜200nmです。
超音波モーターの種類
USMは、次のようなさまざまな基準に基づいてさまざまなタイプに分類されます。
モーター回転操作のタイプに基づくUSMの分類
- ロータリー式モーター
- リニアタイプモーター
バイブレーターの形状に基づくUSMの分類
- ロッドタイプ
- П形
- 円筒形
- リング(四角)タイプ
振動波の種類による分類
- 定在波タイプ–さらに2つのタイプに分類されます。
- 一方向
- 双方向
- 伝搬波タイプまたは進行波タイプ
超音波モーターの働き

超音波モーターの動作
振動はモーターの固定子に誘導され、回転子に運動を伝達するため、および摩擦力を調整するために使用されます。活物質の増幅と(微小)変形は、機械的運動の生成に利用されます。ローターのマクロモーションは、間の摩擦インターフェースを使用してミクロモーションを修正することで実現できます。 固定子と回転子 。
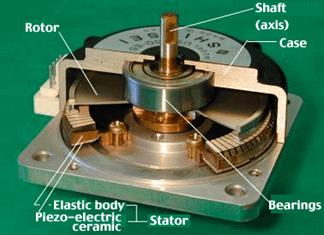
ザ・ 超音波モーター 固定子と回転子で構成されています。 USMの操作により、ローターまたはリニアトランスレーターが変更されます。 USMの固定子は、振動を発生させるための圧電セラミック、発生した振動を増幅するための固定子の金属、および回転子と接触するための摩擦材料で構成されています。
電圧が印加されると、固定子金属の表面に進行波が発生し、回転子が回転します。上記のように、ローターがステーター金属と接触しているため、進行波の各ピークでのみ、楕円運動が発生します。この楕円運動により、ローターは、の方向とは逆の方向に回転します。進行波。
超音波モーターの特徴とメリット
- これらはサイズが小さく、応答性に優れています。
- これらは10から数百rpmの低速と高トルクを持っているので、減速機は必要ありません。
- これらは高い保持力で構成されており、電源を切ってもブレーキやクラッチは不要です。
- それらは小さく、薄く、他の電磁モーターに比べて軽量です。
- これらのモーターには電磁材料が含まれておらず、電磁波も発生しません。したがって、これらは磁場の影響を受けないため、高磁場領域でも使用できます。
- これらのモーターにはギアがなく、これらのモーターを駆動するために聞こえない周波数の振動が使用されます。そのため、ノイズが発生せず、動作が非常に静かです。
- これらのモーターにより、正確な速度と位置の制御が可能です。
- これらのモーターの機械的時定数は1ms未満であり、 これらのモーターの速度制御 ステップレスです。
- これらのモーターは非常に効率が高く、その効率はサイズに影響されません。
超音波モーターのデメリット
- 高周波電源が必要です。
- これらのモーターは摩擦で動作するため、耐久性は非常に低くなります。
- これらのモーターは、垂下する速度-トルク特性を持っています。
超音波モーターの応用
- カメラレンズのオートフォーカスに使用されます。
- コンパクトな紙の取り扱い装置や時計に使用されます。
- 機械部品の運搬に使用されます。
- 乾燥および超音波洗浄に使用されます。
- バーナーにオイルを注入するために使用されます。
- 機器の小型化の可能性が高いことが知られている最高のモーターとして使用されます。
- 医学のMRI磁気共鳴画像スキャンで使用されます。
- フロッピー、ハードディスク、CDドライブなどのコンピュータのディスクヘッドを制御するために使用されます。
- 医学、航空宇宙、およびの分野で多くのアプリケーションで使用されます ロボット工学 。
- ローリング画面を自動的に制御するために使用されます。
- 将来的には、これらのモーターは、自動車産業、ナノポジショニング、マイクロエレクトロニクス、 微小電気機械システム技術 と消費財。
この記事では、圧電超音波モーター、超音波センサー、圧電センサー、圧電アクチュエーター、USMの動作、長所、短所、およびUSMのアプリケーションについて簡単に説明します。上記のトピックに関する詳細については、以下にコメントして質問を投稿してください。
写真クレジット:
- 超音波モーター セミナーのみ
- 圧電センサー imagesco
- 超音波センサー iseerobot
- 圧電アクチュエータ ロボットプラットフォーム
- によるUltrasonicMotorsの動作 電極





{kind=link}
{kind=link}
{kind=link}
{kind=link}