この記事では、TVリモートやDVDリモートなどの標準的なIRリモートハンドセットからの切り替えに応答してDCモーターを操作するように構成された単純な赤外線(IR)リモート制御回路について説明します。
接続されたモーターはどちらの方向にも動かすことができ、停止させることもできます。
この回路は、次の説明で理解できます。
使い方
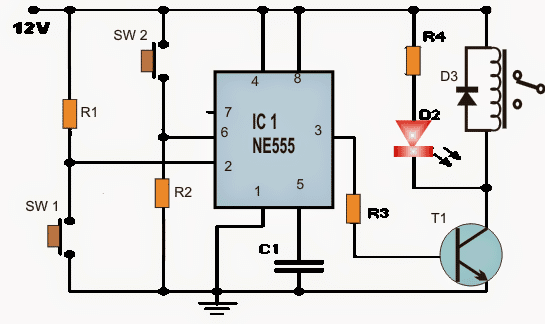
与えられた回路図に見られるように、センサーは標準的な3ピンIRセンサーモジュールであり、通常はTVIRリモートハンドセットに応答します。
IR(赤外線)ビームがセンサーに集束されると、出力として指定されたピンがロジックローになります。この状況は、ビームがそれに焦点を合わせている限り続きます。
“直列RLC回路の共振 ”
PNPであるトランジスタT1は、この論理ロー信号に応答し、接続されたリレーRL1のスイッチングを行う。
接点は、トランジスタのコレクタの瞬時正電位を、フリップフロップ回路として配線されているIC1のピン#14に瞬時に接続します。
最初の論理シーケンスがICのピン#3にあると仮定すると、上記のトリガーはシーケンスをICのピン#2にシフトし、ハイにします。
これにより、T2と対応するリレーRL2がオンになります。
RL2は、モーターの特定のワイヤーを導通させ、負の電源に接続します。モーターのもう一方の端子はRL3から正になるため、設定した方向に動き始めます。
ここで、センサーにIRリモートハンドセットを介して後続のトリガーが与えられ、上記のプロセスが繰り返され、出力シーケンスがIC1のピン#2からピン#4にシフトし、T2をオフにしながらT3を即座にオンにするとします。
上記のアクションにより、リレー接続が元に戻り、モーターは即座に回転方向を反転します。
リモートハンドセットからの別の後続のトリガーで、シーケンスはピン#3に跳ね返ります。ピン#3は何にも接続されておらず、モーターが完全にオフになります。
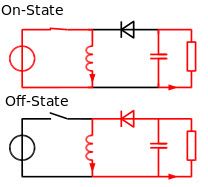
L1、C1を含めることで、センサーのスプリアストリガーによって回路が影響を受けないようにします。
L1を実験して最適値を取得し、リモートコントロールハンドセットからの実際のIR信号ではなく、偶発的な漂遊外部信号のみを「接地」することができます。


上記のIR(赤外線)リモコンモーター回路のパーツリスト。
R1 = 100オーム、
R2 = 1K
R3、R4、R5、R6、R7 = 10K
C1、C4、C6 = 100uF / 25V
C2、C3、C7 = 0.22uF
C5 = 1000uF / 25V
C6 = 0.22uF
L1 = 100mHチョーク
T1 = BC557
T2、T3 = BC547
D1 --- D7 = 1N4007
IC1 = IC4017
IC2 = 7812
すべてのリレー= 12V / 400オーム/ SPDT
センサー= TSOP1738
モーター= 12VDCモーター
前:サージサプレッサーとしてのNTCサーミスタの使用 次へ:MJE13005コンパクト220V電源回路