
定義
ブラシレスDCモーターは、永久磁石の形の回転子と多相電機子巻線の形の固定子で構成されます。従来のDCモーターとは異なり、ブラシが含まれておらず、電気駆動を使用して固定子巻線に給電する電気を使用して転流が行われます。
基本的に、BLDCモーターは、ローターをコアの外側に配置し、巻線をコアに配置する方法と、巻線をコアの外側に配置する方法の2つの方法で構成できます。前者の配置では、回転子磁石は絶縁体として機能し、モーターからの熱放散率を低減し、低電流で動作します。通常、ファンで使用されます。後者の配置では、モーターはより多くの熱を放散するため、トルクが増加します。ハードディスクドライブで使用されます。

BLDC
4極2相モーター操作
ブラシレスDCモーターは、ローターが回転するとステーター巻線間の供給電圧を切り替える電子ドライブによって駆動されます。回転子の位置は、電子制御装置に情報を供給するトランスデューサー(光学式または磁気式)によって監視され、この位置に基づいて、通電される固定子巻線が決定されます。この電子ドライブは、マイクロプロセッサを介して動作するトランジスタ(各相に2つ)で構成されています。

BLDC-DC
永久磁石によって生成された磁場は、固定子巻線の電流によって誘発された磁場と相互作用し、機械的トルクを生成します。電子スイッチング回路またはドライブは、相互作用するフィールド間で0〜90度の一定の角度を維持するように、固定子への供給電流を切り替えます。ホールセンサーは主に固定子または回転子に取り付けられています。ローターが北極または南極に基づいてホールセンサーを通過すると、高信号または低信号が生成されます。これらの信号の組み合わせに基づいて、通電される巻線が定義されます。モーターを動かし続けるために、回転子が固定子の磁場に追いつくように動くので、巻線によって生成された磁場は位置をシフトする必要があります。

回路
4極、2相ブラシレスDCモーターでは、固定子に埋め込まれた単一のホールセンサーが使用されます。ローターが回転すると、ホールセンサーが位置を感知し、磁石の極(北または南)に応じて高信号または低信号を生成します。ホールセンサーは抵抗を介してトランジスタに接続されています。センサーの出力で高電圧信号が発生すると、コイルAに接続されたトランジスタが導通を開始し、電流が流れる経路を提供してコイルAに電力を供給します。コンデンサは最大供給電圧まで充電を開始します。ホールセンサーは、ローターの極性の変化を検出すると、その出力で低電圧信号を発生し、トランジスタ1は電源が供給されないため、カットオフ状態になります。コンデンサの周囲に発生する電圧はVccで、これは2への供給電圧です。ndトランジスタ、およびコイルBは、電流が通過するときに通電されます。
BLDCモーターには、回転する固定永久磁石と固定電機子があり、可動電機子に電流を接続する問題を解消します。そして、おそらく固定子やリラクタンスモーターよりも回転子の極が多いでしょう。後者は永久磁石がなくてもよく、回転子に誘導され、時限固定子巻線によって配置に引き込まれる極だけです。電子コントローラーは、ブラシ付きDCモーターのブラシ/整流子アセンブリに置き換わるもので、モーターの回転を維持するために、巻線への位相を継続的に切り替えます。コントローラは、ブラシ/整流子システムの代わりにソリッドステート回路を使用して、比較時限配電を実行します。

BLDCモーター
ブラシレスDCモーターの7つの利点
- より良い速度対トルク特性
- 高い動的応答
- 高効率
- 電気的損失と摩擦損失がないため、長い動作寿命
- ノイズのない操作
- より高速な範囲
アプリケーション:
ブラシレスDCモーターのコストは、材料と設計の進歩により、発表以来減少しています。このコストの削減は、ブラシDCモーターに対する多数の焦点と相まって、ブラシレスDCモーターを多くの特徴的なアプリケーションで人気のあるコンポーネントにします。 BLDCモーターを使用するアプリケーションには、次のものが含まれますが、これらに限定されません。
- 家電
- 輸送
- 暖房と換気
- インダストリアル・エンジニアリング
- モデルエンジニアリング
動作原理
BLDCモーターの動作原理 ブラシ付きDCモーターの場合と同じです。つまり、内部シャフト位置フィードバックです。ブラシ付きDCモーターの場合、フィードバックは機械式整流子とブラシを使用して実装されます。 BLDCモーター内では、複数のフィードバックセンサーを使用して実現されます。 BLDCモーターでは、主にホール効果センサーを使用します。ローターの磁極がホールセンサーの近くを通過するたびに、シャフトの位置を決定するために使用できるHIGHまたはLOWレベルの信号を生成します。磁場の方向を逆にすると、発生する電圧も逆になります。
BLDCモーターの制御
コントロールユニットはマイクロエレクトロニクスによって実装され、いくつかのハイテクの選択肢があります。これは、マイクロコントローラー、専用マイクロコントローラー、ハードワイヤードマイクロエレクトロニクスユニット、PLC、または同様の別のユニットを使用して実装できます。
アナログコントローラはまだ使用していますが、フィードバックメッセージを処理してそれに応じて制御することはできません。このタイプの制御回路を使用すると、ベクトル制御、フィールド指向制御、高速制御など、すべてモーターの電磁状態に関連する高性能制御アルゴリズムを実装できます。さらに、スライディングモーター制御、適応制御、予測制御などのさまざまなダイナミクス要件に対する外部ループ制御も従来どおり実装されています。
これらすべてに加えて、高性能PIC(パワー集積回路)、ASIC(特定用途向け集積回路)などがあります。これにより、制御装置とパワーエレクトロニクスユニットの両方の構造を大幅に簡素化できます。たとえば、今日では、一部のシステムの制御ユニット全体を置き換えることができる完全なPWM(パルス幅変調)レギュレーターが単一のICに搭載されています。複合ドライバICは、三相コンバータで6つの電源スイッチすべてを駆動する完全なソリューションを提供できます。日々追加される同様の集積回路が数多くあります。結局のところ、システムアセンブリには、すべてのハードウェアが適切な形状と形式になっている制御ソフトウェアの一部のみが含まれる可能性があります。
PWM(パルス幅変調)波を使用して、モーターの速度を制御できます。ここでは、モーターの速度を制御するパルスのオン時間とオフ時間に応じて、平均電圧が与えられるか、モーターを流れる平均電流が変化します。つまり、波のデューティサイクルがモーターの速度を制御します。デューティサイクル(ON時間)を変更すると、速度を変更できます。出力ポートを交換することにより、モーターの方向を効果的に変更します。
速度制御
BLDCモーターの速度制御は、モーターを目的の速度で動作させるために不可欠です。ブラシレスDCモーターの速度は、入力DC電圧を制御することで制御できます。電圧が高いほど、速度は速くなります。モーターが通常モードで動作するか、定格速度未満で動作する場合、電機子の入力電圧はPWMモデルを介して変更されます。モーターが定格速度を超えて動作している場合、流出電流を進めることによって磁束が弱まります。
速度制御は、閉ループまたは開ループの速度制御にすることができます。
開ループ速度制御– DC電圧をチョッピングすることにより、モーター端子に印加されるDC電圧を制御するだけです。ただし、これにより、何らかの形の電流制限が発生します。
閉ループ速度制御 –モーターからの速度フィードバックを介して入力電源電圧を制御する必要があります。したがって、供給電圧はエラー信号に応じて制御されます。
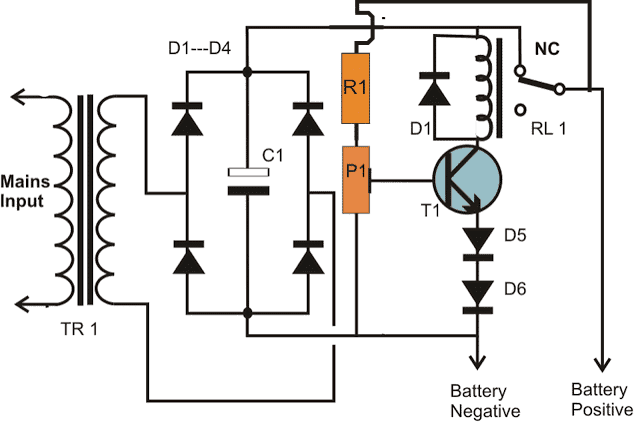
“可変DC電源回路図 ”
閉ループ速度制御は、3つの基本コンポーネントで構成されています。
- 必要なPWMパルスを生成するPWM回路。マイクロコントローラまたはタイマーICのいずれかです。
- 実際のモーター速度を感知するための感知装置。ホール効果センサー、赤外線センサー、または光学式エンコーダーにすることができます。
- モーターの動作を制御するモータードライブ。
エラー信号に基づいて供給電圧を変更するこの手法は、pid制御手法またはファジー論理のいずれかを使用できます。
ブラシレスDCモーターの速度制御への応用

BLDCDCモーター制御
モーターの動作は、オプトカプラーとMOSFETの配置を使用して制御され、入力DC電力はマイクロコントローラーからのPWM技術によって制御されます。モーターが回転すると、シャフトに白いスポットが存在するため、シャフトに存在する赤外線LEDが白色光で照らされ、赤外線を反射します。フォトダイオードはこの赤外光を受け取り、その抵抗が変化するため、接続されているトランジスタへの供給電圧が変化し、マイクロコントローラにパルスが与えられて1分あたりの回転数が生成されます。この速度はLCDに表示されます。
必要な速度は、マイクロコントローラーに接続されたキーパッドに入力されます。検出された速度と目的の速度の違いはエラー信号であり、マイクロコントローラーはファジー論理に基づいてエラー信号に従ってPWM信号を生成し、モーターにDC電力を入力します。
したがって、閉ループ制御を使用すると、ブラシレスDCモーターの速度を制御でき、任意の速度で回転させることができます。
フォトクレジット:






{kind=link}