付属のポテンショメータを回転させることにより、接続されたモータの速度を直線的に制御できる回路をモータ速度制御回路と呼びます。
ここでは、DCモーター用の3つの簡単に構築できる速度コントローラー回路を紹介します。1つはMOSFET IRF540を使用し、2つ目はIC 555を使用し、3つ目はトルク処理を特徴とするIC556を使用します。
デザイン#1:MOSFETベースのDCモータースピードコントローラー
以下に示すように、非常にクールで簡単なDCモーター速度コントローラー回路は、単一のMOSFET、抵抗、およびポットを使用して構築できます。

BJTエミッタフォロワの使用

ご覧のとおり、MOSFETはソースフォロワーまたは共通ドレインモードとして装備されています。この構成の詳細については、 この投稿を参照してください 、BJTバージョンについて説明していますが、動作原理は同じです。
上記のDCモーターコントローラーの設計では、ポット調整により、MOSFETのゲート全体にさまざまな電位差が生じ、MOSFETのソースピンはこの電位差の値に従い、それに応じてモーター両端の電圧を調整します。
これは、ソースが常にゲート電圧より4または5V遅れており、この差に応じて上下に変化し、モーターの両端に2V〜7Vの電圧が変化することを意味します。
ゲート電圧が約7Vの場合、ソースピンはモーターに最小2Vを供給し、モーターのスピンを非常に遅くします。ポット調整によってソースピンの両端で7Vが使用可能になり、ゲートのゲート全体で12Vが完全に生成されます。 MOSFET。
ここでは、MOSFETのソースピンがゲートを「フォロー」しているように見えるため、ソースフォロワーという名前が付けられていることがはっきりとわかります。
これは、MOSFETが最適に導通できるようにするために、MOSFETのゲートとソースピンの差が常に約5Vでなければならないために発生します。
とにかく、上記の構成はモーターのスムーズな速度制御を実施するのに役立ち、設計は非常に安価に構築できます。
MOSFETの代わりにBJTを使用することもできます。実際、BJTは、モーター全体で約1V〜12Vのより高い制御範囲を生成します。
ビデオデモ
https://youtu.be/W762NTuQ19gモーター速度を均一かつ効率的に制御する場合、PWMベースのコントローラーが理想的なオプションになります。ここでは、この操作を実装するための簡単な回路について詳しく説明します。
デザイン#2:IC555を使用したPWMDCモーター制御
PWMを使用した単純なモーター速度コントローラーの設計は、次のように理解できます。
回路に電力が供給されると、コンデンサC1が充電されないため、トリガーピンは論理ローの位置になります。
上記の条件により発振サイクルが開始され、出力がロジックハイに変化します。
出力が高いと、コンデンサはD2を介して強制的に充電されます。
電源の2/3の電圧レベルに達すると、ICのしきい値であるピン#6がトリガーされます。
ピン#6がトリガーされた瞬間、ピン#3とピン#7はロジックローに戻ります。
ピン#3がローの場合、C1は再びD1を介して放電を開始し、C1の両端の電圧が供給電圧の1/3のレベルを下回ると、ピン#3とピン#7が再びハイになり、サイクルが続きます。繰り返し続けます。
興味深いことに、C1には、ダイオードD1、D2を介して、およびポットによって設定された抵抗アームを介して、充電および放電のプロセス用に2つの個別に設定されたパスがあります。
これは、ポットがどのように設定されていても、充電および放電中にC1が遭遇する抵抗の合計が同じままであるため、出力パルスの波長が常に同じであることを意味します。
ただし、充電または放電の期間はパスで発生する抵抗値に依存するため、ポットは調整に従ってこれらの期間を個別に設定します。
充電時間と放電時間は出力デューティサイクルに直接関連しているため、ポットの調整に応じて変化し、出力で意図された変化するPWMパルスを形成します。
マーク/スペース比の平均結果により、PWM出力が発生し、PWM出力がモーターのDC速度を制御します。
PWMパルスは、ポットの設定に応じて接続されたモーター電流に反応して制御するMOSFETのゲートに供給されます。
モーターを流れる電流レベルが速度を決定し、ポットを介して制御効果を実装します。
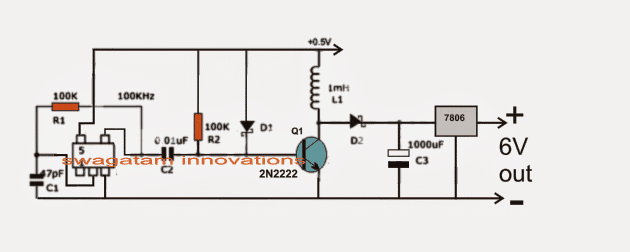
ICからの出力の周波数は、次の式で計算できます。
F = 1.44(VR1 * C1)
MOSFETは、要件または負荷電流に応じて選択できます。
提案されたDCモーター速度コントローラーの回路図を以下に示します。

プロトタイプ:

ビデオテストの証拠:
https://youtu.be/M-F7MWcSiFY上記のビデオクリップでは、IC555ベースの設計がDCモーターの速度を制御するためにどのように使用されているかを見ることができます。ご覧のとおり、電球はPWMに応答して完全に動作し、その強度を最小グローから最大ローまで変化させますが、モーターはそうではありません。
モーターは最初は狭いPWMに応答せず、PWMが大幅に高いパルス幅に調整された後、ジャークで開始します。
これは、回路に問題があることを意味するのではなく、DCモーターアーマチュアが一対の磁石の間にしっかりと保持されているためです。始動を開始するには、アーマチュアは磁石の2つの極を横切って回転をジャンプする必要がありますが、これはゆっくりとした穏やかな動きでは発生しません。それは推力で開始する必要があります。
そのため、モーターは最初にPWMのより高い調整を必要とし、回転が開始されると、電機子はある程度の運動エネルギーを獲得し、より狭いPWMによってより遅い速度を達成できるようになります。
ただし、それでも、上記で説明したのと同じ理由で、回転をほとんど動かない低速状態にすることは不可能な場合があります。
以下に示すように、最初の図にいくつかの変更を加えることで、応答を改善し、可能な限り遅いPWM制御を実現するために最善を尽くしました。

そうは言っても、モーターがギアまたはプーリーシステムを介して負荷で取り付けられているかストラップされている場合、モーターはより遅いレベルでより良い制御を示す可能性があります。
これは、負荷がダンパーとして機能し、低速調整中に制御された動きを提供するのに役立つために発生する可能性があります。
設計#3:強化された速度制御のためのIC556の使用
DCモーターの速度を変える それほど難しくないように見えるかもしれません、そしてあなたはそれのためにたくさんの回路を見つけるかもしれません。
ただし、これらの回路は、より低いモーター速度で一貫したトルクレベルを保証しないため、機能が非常に非効率になります。
さらに、トルクが不十分なために非常に低速になると、モーターがストールする傾向があります。
もう1つの重大な欠点は、これらの回路にモーター反転機能が含まれていないことです。
提案された回路は、上記の欠点がまったくなく、可能な限り低い速度でも高いトルクレベルを生成および維持することができます。
回路動作
提案されているPWMモーターコントローラー回路について説明する前に、それほど効率的ではない、より単純な代替案についても学びたいと思います。それでも、モーターの負荷が高くなく、速度が最小レベルに低下しない限り、それはかなり良いと見なすことができます。
この図は、接続されたモーターの速度を制御するために単一の556 ICを使用する方法を示しています。詳細については説明しません。この構成の唯一の顕著な欠点は、トルクがモーターの速度に正比例することです。
提案された高トルク速度コントローラ回路設計に戻ると、ここでは、1つのパッケージに2つの555ICを含む1つまたは1つのIC556の代わりに、2つの555ICを使用しました。
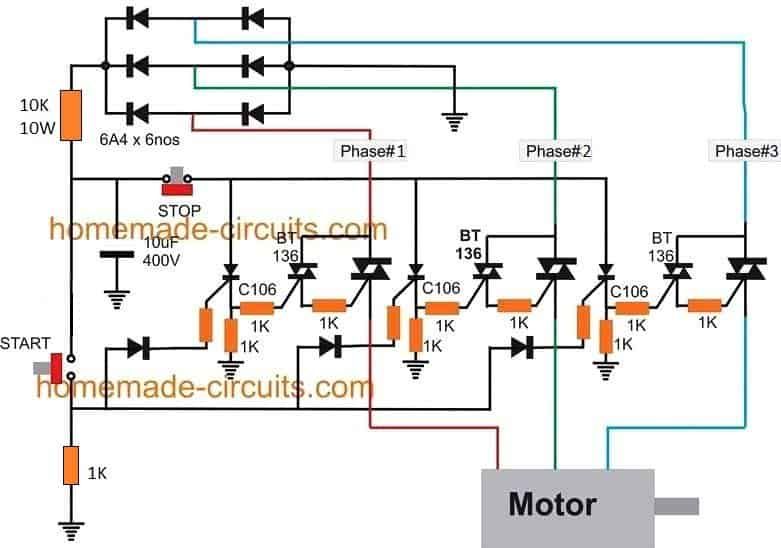
回路図

主な特徴
簡単に提案 DCモーターコントローラー 次の興味深い機能が含まれています。
速度は、ストールすることなく、ゼロから最大まで連続的に変化させることができます。
トルクは速度レベルの影響を受けることはなく、最小速度レベルでも一定に保たれます。
モーターの回転は、ほんの一瞬で反転または反転できます。
速度はモーター回転の両方向で可変です。
二つ 555 IC 2つの別々の機能が割り当てられています。 1つのセクションは、パッケージ内の前の555セクションに供給される100Hzの方形波クロックを生成する非安定マルチバイブレーターとして構成されます。
上記の周波数は、PWMの周波数を決定するためのものです。
トランジスタBC557は、コレクタアームの隣接するコンデンサを充電状態に保つ定電流源として使用されます。
これにより、上記のコンデンサの両端に鋸歯状の電圧が発生します。これは、556 ICの内部で、示されているピン配置を介して外部から印加されたサンプル電圧と比較されます。
外部から印加されるサンプル電圧は、単純な0〜12Vの可変電圧電源回路から得ることができます。
556 ICに印加されるこの変化する電圧は、出力でのパルスのPWMを変化させるために使用され、最終的には接続されたモーターの速度調整に使用されます。
スイッチS1は、必要に応じてモーターの方向を瞬時に反転させるために使用されます。
パーツリスト
- R1、R2、R6 = 1K、
- R3 = 150K、
- R4、R5 = 150オーム、
- R7、R8、R9、R10 = 470オーム、
- C1 = 0.1uF、
- C2、C3 = 0.01uF、
- C4 = 1uF / 25VT1、
- T2 = TIP122、
- T3、T4 = TIP127
- T5 = BC557、
- T6、T7 = BC547、
- D1 --- D4 = 1N5408、
- Z1 = 4V7 400mW
- IC1 = 556、
- S1 = SPDTトグルスイッチ
上記の回路は、elecktor electronicIndia誌にずっと前に掲載された次のモータードライバー回路から着想を得たものです。
IC555を使用したモータートルクの制御

以下に示すように、最初のモーター制御図は、モーター反転操作にDPDTスイッチを使用し、速度制御の実装にエミッタフォロワトランジスタを使用することで大幅に簡略化できます。

シングルオペアンプを使用した精密モーター制御
DCの非常に洗練されたまたは複雑な制御モーターは、オペアンプとタコジェネレーターを使用して実現できます。オペアンプは、電圧に敏感なスイッチとして装備されています。以下に示す回路では、タコジェネレータの出力が事前設定された基準電圧より低くなるとすぐに、スイッチングトランジスタがオンになり、100%の電力がモーターに供給されます。
オペアンプのスイッチング動作は、基準電圧の周囲わずか数ミリボルトで発生します。ツェナー安定化されたデュアル電源が必要になります。

このモーターコントローラーは、機械的な煩わしさを伴わずに、無限に調整可能な範囲を可能にします。
オペアンプの出力は電源レールレベルの+/- 10%しかないため、ダブルエミッタフォロワを使用すると、巨大なモーター速度を制御できます。
基準電圧は、サーミスタやLDRなどを介して固定できます。回路図に示されている実験セットアップでは、RCA 3047Aオペアンプと、タコジェネレータとして0.25W 6Vモーターを使用し、13000rpmで約4Vを生成しました。意図したフィードバック。
前:3つのベストジュール泥棒回路 次へ:圧力鍋ホイッスルカウンター回路