提示された3相VFD回路( 私がデザインした )は、任意の3相ブラシ付きACモーター、またはブラシレスACモーターの速度を制御するために使用できます。アイデアはトムさんからリクエストされました
VFDの使用
提案された3相VFD回路は、レギュレーション効率がそれほど重要ではないほとんどの3相ACモーターに普遍的に適用できます。
特に制御に使用できます かご形誘導電動機の速度 開ループモードで、場合によっては、記事の後半で説明する閉ループモードでも使用できます。
三相インバータに必要なモジュール
提案されている3相VFDまたは可変周波数駆動回路を設計するには、基本的に次の基本的な回路ステージが必要です。
- PWM電圧コントローラー回路
- 三相ハイサイド/ローサイドHブリッジドライバー回路
- 三相発電機回路
- V / Hzパラメータを生成するための電圧から周波数への変換回路。
次の説明を参考にして、上記のステージの機能の詳細を学びましょう。
単純なPWM電圧コントローラー回路は、以下の図で確認できます。

PWMコントローラー
同じICのピン5に印加される電位に応じてIC2のピン3に変化するPWM出力を生成するように基本的に設計されている上記のPWMジェネレータステージの機能をすでに組み込んで説明しました。
図に示されている1KプリセットはRMS制御ノブであり、IC2のピン3でPWMの形で必要な比例量の出力電圧を取得して、さらに処理するために適切に調整できます。これは、メインの220Vまたは120V ACRMSと同等の対応する出力を生成するように設定されています。
Hブリッジドライバ回路
次の図は、ICIRS2330を使用したシングルチップHブリッジ3相ドライバ回路を示しています。
複雑さのほとんどはチップに組み込まれた洗練された回路によって処理されるため、設計は単純に見えます。
十分に計算された3相信号は、3相信号発生器ステージを介してICのHIN1 / 2/3およびLIN1 / 2/3入力に適用されます。
の出力 IC IRS2330 6つのMOSFETまたはIGBTブリッジネットワークと統合されていることがわかります。これらのドレインは、制御が必要なモーターで適切に構成されています。
ローサイドMOSFET / IGBTゲートは、ブリッジMOSFETステージへのPWM注入を開始するために、上記のPWMジェネレータ回路ステージのIC2ピン#3と統合されています。この調整は、最終的にモーターが設定に従って(最初の図の1 kプリセットを介して)目的の速度を得るのに役立ちます。

次の図では、必要な3相信号発生器回路を視覚化しています。

三相発電機回路の構成
三相発生器は、2つのCMOSチップCD4035およびCD4009を中心に構築されており、示されているピン配置全体で正確な寸法の三相信号を生成します。
三相信号の周波数は、供給される入力クロックに依存します。入力クロックは、目的の三相信号の6倍である必要があります。つまり、必要な3相周波数が50 Hzの場合、入力クロックは50 x 6 = 300Hzである必要があります。
また、ドライバICの有効周波数を変更するために、上記のクロックを変更できることも意味します。ドライバICは、モーターの動作周波数の変更を担当します。
ただし、上記の周波数変更は電圧の変化に応じて自動で行う必要があるため、電圧から周波数への変換器が不可欠になります。次の段階では、必要な実装のための単純で正確な電圧から周波数への変換回路について説明します。
一定のV / F比を作成する方法
通常、誘導電動機では、モーター速度とトルクの最適な効率を維持するために、スリップ速度またはローター速度を制御する必要があります。これは、一定のV / Hz比を維持することによって可能になります。固定子磁束は入力供給周波数に関係なく常に一定であるため、回転子速度は次の方法で簡単に制御できます。 V / Hz比を一定に保つ 。
開ループモードでは、これは大まかに所定のV / Hz比を維持し、手動で実装することで実行できます。たとえば、最初の図では、これはR1と1Kプリセットを適切に調整することで実行できます。 R1が周波数を決定し、1Kが出力のRMSを調整するため、2つのパラメーターを適切に調整することにより、必要な量のV / Hzを手動で適用できます。
ただし、誘導モーターのトルクと速度を比較的正確に制御するには、閉ループ戦略を実装する必要があります。この戦略では、スリップ速度データを処理回路に供給して、V / Hz比を自動調整する必要があります。値は常にほぼ一定のままです。
閉ループフィードバックの実装
このページの最初の図は、以下に示すように、閉ループ自動V / Hzレギュレーションを設計するために適切に変更できます。

上の図では、IC2のピン#5の電位によって、同じICのピン#3で生成されるSPWMの幅が決まります。 SPWMは、ピン#5のメイン12VリップルサンプルをIC2のピン#7の三角波と比較することによって生成され、これはモーター制御用のローサイドMOSFETに供給されます。
最初、このSPWMは(1Kパーセットを使用して)調整されたレベルに設定され、指定された公称速度レベルでローターの動きを開始するために3相ブリッジのローサイドIGBTゲートをトリガーします。
ローターローターが回転し始めるとすぐに、ローターメカニズムを備えたタコメーターがIC2のピン#5に比例して追加の電圧を発生させます。これにより、SPWMが比例して広くなり、モーターのステーターコイルにより多くの電圧が発生します。これにより、ローター速度がさらに上昇し、IC2のピン#5でより多くの電圧が発生します。これは、SPWM等価電圧が上昇できなくなり、ステーターローターの同期が定常状態になるまで続きます。
上記の手順は、モーターの動作期間全体にわたって自己調整を続けます。
タコメータの作成と統合の方法
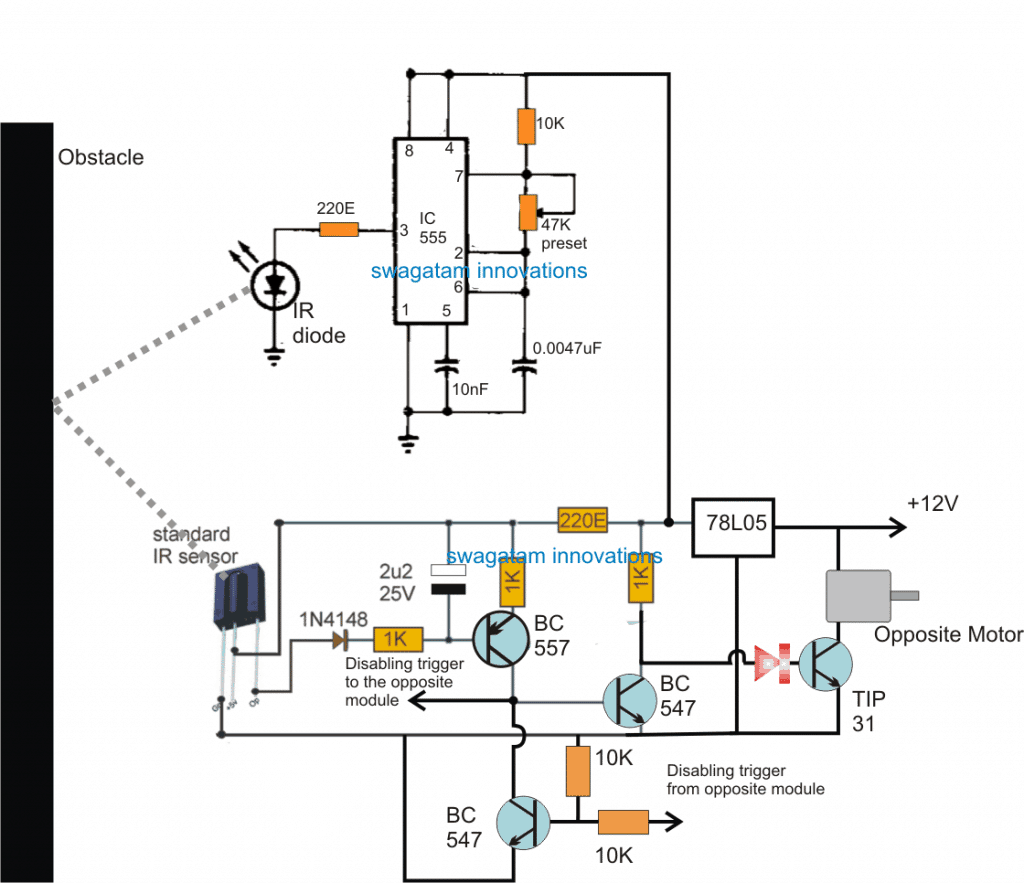
簡単なタコメータの設計を次の図に示します。これは、回転周波数がBC547のベースに給電できるように、ローターメカニズムと統合できます。

ここで、ローター速度データは、ホール効果センサーまたはIR LED /センサーネットワークから収集され、T1のベースに供給されます。
T1はこの周波数で発振し、IC555単安定回路を適切に構成して作られたタコメータ回路をアクティブにします。
上記のタコメータからの出力は、T1のベースでの入力周波数に応じて比例して変化します。
周波数が上昇すると、右端のD3出力の電圧も上昇し、その逆も同様であり、V / Hz比を比較的一定のレベルに保つのに役立ちます。
速度を制御する方法
一定のV / Fを使用するモーターの速度は、IC 4035のクロック入力で周波数入力を変更することで実現できます。これは、IC555非安定回路または任意の標準非安定回路からのクロック入力に可変周波数を供給することで実現できます。 IC4035。
周波数を変更すると、モーターの動作周波数が効果的に変更され、それに応じてスリップ速度が低下します。
これはタコメータによって検出され、タコメータはIC2のピン#5の電位を比例的に減少させ、モーターのSPWM含有量を比例的に減少させます。その結果、モーターの電圧が減少し、モーター速度の変動が正しくなります。必要なV / F比。
自家製のVからFへのコンバーター

上記の電圧から周波数への変換回路では、IC 4060が使用され、その周波数依存抵抗は、意図された変換のためにLED / LDRアセンブリを介して影響を受けます。
LED / LDRアセンブリは遮光ボックス内に密閉されており、LDRはICの1M周波数依存抵抗の両端に配置されています。
LDR / LDR応答はかなり線形であるため、LDRのLEDの照明が変化すると、ICのピン3全体で比例して変化する(増加または減少する)周波数が生成されます。
ステージのFSDまたはV / Hz範囲は、1M抵抗またはC1値を適切に設定することで設定できます。
LEDは、最初のPWM回路ステージからPWMを介して得られ、点灯する電圧です。これは、PWMが変化すると、LED照明も変化し、その結果、上の図のIC4060のピン3で周波数が比例して増加または減少することを意味します。
コンバーターとVFDの統合
IC 4060からのこの変化する周波数は、3相ジェネレータICCD4035クロック入力と統合する必要があります。
上記のステージは、3相VFD回路を作成するための主要な要素を形成します。
ここで、IGBTモーターコントローラーに供給するために必要なDC BUSと、設計全体のセットアップ手順について説明することが重要です。
IGBTHブリッジレールに適用されるDCBUSは、次の回路構成を使用して使用可能な3相メイン入力を整流することによって取得できます。 IGBT DC BUSレールは、「負荷」として示されているポイント間で接続されています。

単相電源の場合、整流は標準の4ダイオードブリッジネットワーク構成を使用して実装できます。
提案された3相VFD回路の設定方法
これは、次の手順に従って実行できます。
(モーターが接続されていない)IGBTの両端にDCバス電圧を印加した後、レールの両端の電圧が目的のモーター電圧仕様と等しくなるまでPWM1kプリセットを調整します。
次に、IC IRS2330入力のいずれかを、指定されたモーター仕様に従って必要な正しい周波数レベルに調整するために、IC 40601Mプリセットを調整します。
上記の手順が完了した後、指定されたモーターが接続され、さまざまな電圧レベル、V / Hzパラメーターが供給され、接続されたモーターでの自動V / Hz動作が確認されます。
前:グローライト回路を構築する方法 次へ:軟水器回路の調査