この記事では、比較的簡単な計算で誘導電動機の速度を制御するためにスカラー制御アルゴリズムがどのように実装されているかを理解し、それでもモーターの適度に優れた線形可変速度制御を実現しようとします。

多くのトップマーケット分析からのレポートは、 誘導電動機 重工業用モーター関連のアプリケーションや仕事を処理する場合に最も人気があります。誘導電動機の人気の背後にある主な理由は、基本的に、その高度な堅牢性、摩耗の問題に関する信頼性の向上、および比較的高い機能効率によるものです。
とはいえ、誘導電動機には、通常の従来の方法では制御が容易ではないため、典型的な欠点が1つあります。誘導電動機の制御は、主に次のものを含むかなり複雑な数学的構成のため、比較的要求が厳しくなります。
- コア飽和時の非線形応答
- 巻線の温度変化による形状振動の不安定性。
これらの重要な側面により、誘導電動機制御の実装には、たとえば「ベクトル制御」方式を使用し、さらにマイクロコントローラーベースの処理システムを使用するなど、信頼性の高い完全に計算されたアルゴリズムが最適に必要です。
スカラー制御の実装を理解する
ただし、はるかに簡単な構成を使用して誘導モーター制御を実装するために適用できる別の方法があります。それは、非ベクトル駆動技術を組み込んだスカラー制御です。
簡単な電圧フィードバックと電流制御システムでAC誘導モーターを動作させることにより、AC誘導モーターを定常状態にすることが実際に可能です。
このスカラー法では、実際に実験するか、適切な式と計算によって正しい値が得られたら、スカラー変数を微調整できます。
次に、この測定は、開ループ回路または閉フィードバックループトポロジを介してモーター制御を実装するために使用できます。
スカラー制御方式は、モーターで適度に良好な定常状態の結果を約束しますが、その過渡応答は基準に達していない可能性があります。
誘導電動機のしくみ
誘導電動機の「誘導」という言葉は、固定子巻線によって回転子を磁化することが動作の重要な側面になるという、その動作の独自の方法を指します。
固定子巻線にACが印加されると、固定子巻線からの振動磁界が回転子電機子と相互作用して回転子に新しい磁界を生成し、それが固定子磁界と反応して回転子に大量の回転トルクを引き起こします。 。この回転トルクは、機械に必要な効果的な機械的出力を提供します。
三相かご形誘導電動機とは
これは誘導電動機の最も人気のある変種であり、産業用アプリケーションで広く使用されています。かご形誘導電動機では、回転子は回転子の軸を囲む一連の棒状の導体を持ち、独特のかご形構造を示しているため、「かご形」と呼ばれています。
形状が歪んでいてローター軸の周りを走っているこれらのバーは、バーの端に厚くて頑丈な金属リングが取り付けられています。これらの金属リングは、バーを所定の位置にしっかりと固定するのに役立つだけでなく、バー全体で本質的な電気的短絡を強制します。
固定子巻線に3相正弦波交流を連続して印加すると、結果として生じる磁場も3相固定子正弦波周波数(ωs)と同じ速度で動き始めます。
かご形回転子アセンブリは固定子巻線内に保持されているため、固定子巻線からの上記の交互の3相磁場は、回転子アセンブリと反応して、ケージアセンブリの棒導体に同等の磁場を誘導します。
これにより、二次磁場がローターバーの周囲に蓄積され、その結果、この新しい磁場が固定子磁場と相互作用し、固定子磁場の方向に追従しようとする回転子に回転トルクがかかります。

その過程で、回転子速度は固定子の周波数速度に到達しようとし、固定子同期磁界速度に近づくと、固定子周波数速度と回転子回転速度の相対速度差eが減少し始め、これにより磁気が減少します。固定子の磁場に対する回転子の磁場の相互作用により、最終的には回転子のトルクが減少し、回転子の等価出力が減少します。
これにより、ローターの最小電力が得られ、この速度で、ローターは定常状態を獲得したと言われます。この状態では、ローターの負荷は同等であり、ローターのトルクと一致します。
負荷に応じた誘導電動機の動作は、以下に説明するように要約できます。
回転子(軸)速度と固定子内部周波数速度の微妙な差を維持することが義務付けられるため、実際に負荷を処理する回転子速度は、固定子周波数速度よりわずかに遅い速度で回転します。逆に、固定子に50Hzの3相電源が供給されていると仮定すると、固定子巻線全体のこの50Hz周波数の角速度は、常に回転子の回転速度の応答よりもわずかに高くなります。これは、最適を確保するために本質的に維持されます。ローターの電源を入れます。
誘導電動機のスリップとは
固定子の周波数の角速度と回転子の応答回転速度の相対的な差は、「スリップ」と呼ばれます。モーターがフィールド指向の戦略で動作している状況でも、スリップが存在する必要があります。
誘導電動機のローターシャフトは、その回転を外部励起に依存しないため、従来のスリップリングやブラシなしで動作でき、摩耗や破損がほとんどなく、高効率でありながら、メンテナンスが安価です。
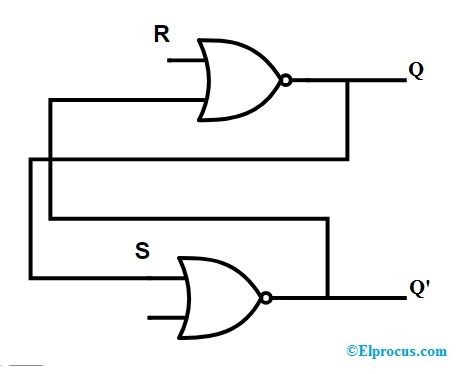
“全加算器回路の真理値表 ”
これらのモーターのトルク係数は、固定子と回転子の磁束の間に確立された角度によって決定されます。
下の図を見ると、ローターの速度がΩとして割り当てられており、ステーターとローターの両端の周波数は、次の式で表されるパラメーター「s」またはスリップによって決定されることがわかります。
s =( ω s - ω r )/ ω s
上記の式で、sは、固定子の同期周波数速度と回転子シャフトで発生する実際のモーター速度との差を示す「スリップ」です。

スカラー速度制御理論を理解する
誘導電動機制御の概念では テクニカルV / Hz が採用されている場合、速度制御は、エアギャップ磁束が定常状態の予想範囲を超えて逸脱することがないように、つまりこの推定定常状態内に維持されるように、周波数に対して固定子電圧を調整することによって実装されます。値、したがってそれはまた呼ばれます スカラー制御 この手法は、モーター速度を制御するための定常状態のダイナミクスに大きく依存するためです。
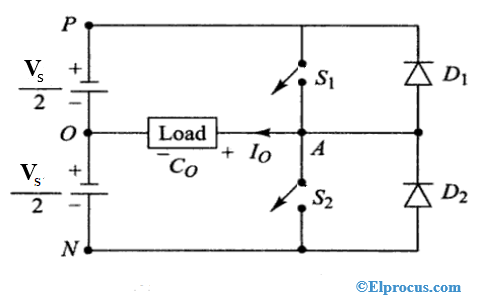
この概念の動作は、スカラー制御手法の簡略化されたスキームを示す次の図を参照することで理解できます。セットアップでは、固定子抵抗(Rs)がゼロであると想定されていますが、固定子漏れインダクタンス(LIs)は、回転子の漏れインダクタンスと磁化インダクタンス(LIr)に影響を与えます。エアギャップ磁束の大きさを実際に表す(LIr)は、総漏れインダクタンス(Ll = Lls + Llr)の前に押されたことがわかります。

このため、磁化電流によって生成されるエアギャップ磁束は、固定子の周波数比に近い近似値になります。したがって、定常状態評価のフェーザ式は次のように記述できます。

線形磁気領域で動作している可能性のある誘導モーターの場合、Lmは変化せず、一定のままです。このような場合、上記の式は次のように表すことができます。

ここで、VとΛはそれぞれ固定子電圧値と固定子磁束ですが、Ṽは設計のフェーザパラメータを表します。
上記の最後の式は、入力周波数(f)の変化に関係なく、V / f比が一定に保たれている限り、磁束も一定に保たれるため、電源電圧周波数に依存せずにトルクを動作できることを明確に説明しています。 。これは、ΛMが一定のレベルに維持されている場合、Vs /ƒ比も一定の関連速度でレンダリングされることを意味します。したがって、モーターの速度を上げると、固定子巻線の両端の電圧も比例して上げる必要があります。これにより、一定のVs / fを維持できます。
ただし、ここでのスリップはモーターに取り付けられた負荷の関数であるため、同期周波数速度はモーターの実際の速度を表していません。
ローターに負荷トルクがない場合、結果として生じるスリップは無視できるほど小さくなり、モーターが同期速度に近づくことができます。
そのため、基本的なVs / fまたはV / Hz構成では、通常、モーターに負荷トルクが接続されている場合、誘導モーターの正確な速度制御を実装する機能がない場合があります。ただし、スリップ補正は、速度測定とともにシステムに非常に簡単に導入できます。
以下に示すグラフ表示は、閉ループV / Hzシステム内の速度センサーを明確に示しています。

実際の実装では、通常、固定子の電圧と周波数の比率は、これらのパラメータ自体の定格に依存する場合があります。
V / Hz速度制御の分析
次の図では、標準のV / Hz分析を確認できます。

基本的に、V / Hzプロファイル内に3つの速度選択範囲があります。これは、次の点から理解できます。
- 参照 図4 カットオフ周波数が0-fcの領域にある場合、電圧入力が不可欠になり、固定子巻線の両端に電位降下が発生します。この電圧降下は無視できず、供給電圧Vsを上げることで補償する必要があります。これは、この領域ではV / Hz比プロファイルが線形関数ではないことを示しています。 Rs≠0の定常状態の等価回路を使用して、適切な固定子電圧のカットオフ周波数fcを分析的に評価できます。
- 領域fc-r(rated)Hzでは、一定のVs / Hz関係を実行できます。この場合、関係の傾きは、 エアギャップフラックスの量 。
- より高い周波数で動作するf(定格)を超える領域では、固定子電圧がf(定格)値に制限される傾向があるため、一定の速度でVs / f比を実行することが不可能になります。これは、固定子巻線が絶縁破壊を受けないようにするために発生します。この状況のために、結果として生じるエアギャップ磁束は損なわれ、減少する傾向があり、それに応じてロータートルクが減少します。誘導電動機のこの動作段階は、 「弱体化地域」 。このような状況を防ぐために、通常、これらの周波数範囲では一定のV / Hz規則は守られていません。
固定子巻線の周波数変化に関係なく一定の固定子磁束が存在するため、回転子のトルクはスリップ速度のみに依存する必要があります。この効果は、 図5 上記
適切なスリップ速度調整により、一定のV / Hz原理を採用することにより、誘導電動機の速度をローター負荷のトルクとともに効果的に制御できます。
したがって、速度制御の開ループモードであろうと閉ループモードであろうと、両方とも一定のV / Hzルールを使用して実装できます。
開ループ制御モードは、HVACユニットや、ファンやブロワーのようなアプライアンスなど、速度制御の精度が重要な要素ではない可能性があるアプリケーションで使用できます。このような場合、負荷の周波数はモーターの必要な速度レベルを参照して求められ、ローターの速度は瞬間的な同期速度にほぼ追従すると予想されます。モーターのスリップから生じる速度のいかなる形の不一致も、一般に無視され、そのようなアプリケーションで受け入れられます。
参照:http://www.ti.com/lit/an/sprabq8/sprabq8.pdf
前:図と式を使用したプルアップ抵抗とプルダウン抵抗の理解 次へ:186502600mAhバッテリーデータシートと動作