

暗視カメラを備えた戦争フィールドスパイロボット
その名の通りスパイロボットは、敵の領土をスパイする目的で使用されるロボットです。そのアプリケーションは次のとおりです。
- 戦時中、敵の地形から情報を収集し、その情報をはるかに安全な場所で監視し、反撃の計画を安全に考案するために使用できます。
- テロ組織の場所を追跡し、適切なタイミングで攻撃を計画します。
- 人間が行けない被災地を監視します。
戦場スパイロボットについての簡単なアイデア
それでは、スパイ目的で戦場でロボットを使用する方法について簡単に説明しましょう。必要なのは、ロボット回路に取り付けられたワイヤレスカメラで、敵の領土の画像やビデオをキャプチャして送信し、テレビの受信ユニットで受信します。
戦争の簡単なプロトタイプを設計できます フィールドスパイロボット リモートで制御でき、カメラから送信された画像をテレビで監視および分析できます。
戦場スパイロボットのハードウェア実装
ホイールとモーターを備えたベースとは別に、戦場のスパイロボットを設計するために必要なのは、次のコンポーネントだけです。
- センサーユニット–ワイヤレスナイトビジョンカメラ: 基本的なカメラの構成とは別に、送信機ユニットで構成されています。画像をキャプチャし、送信機を介してデジタル信号の形式で送信します。デジタル信号は、テレビまたはコンピュータに接続された受信機で受信されます。カメラは、受信機から30マイル離れた場所に置くことができます。 A 暗視カメラ イメージインテンシファイアを使用して可視光を増幅するか、オブジェクトによって直接赤外線を使用することによって照明を受け取ることができます-熱画像またはオブジェクトによって反射された赤外線-近赤外線照明。
- レシーバーユニット: ロボットはまた、モーターを制御するためのコマンド信号を受信する受信機ユニット、したがってロボットユニットで構成されています。
- アクチュエータ: これは、ロボットに前後の動きを提供するアクチュエータとしての2つのDCモーターで構成されています。
- コントロールユニット: これは、マイクロコントローラー、エンコーダー、RFモジュールで構成されるリモートトランスミッターユニットと、RFレシーバーモジュール、マイクロコントローラー、デコーダーで構成される回路に組み込まれたレシーバーユニットで構成されます。
戦場のスパイロボット暗視カメラはどのように機能しますか?
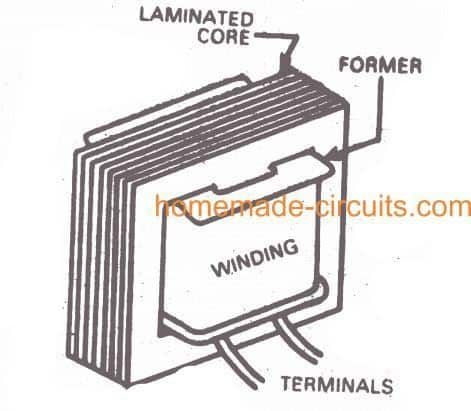
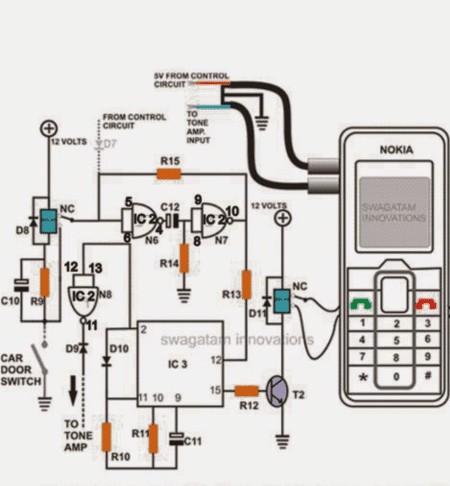
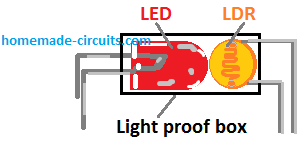
ロボットに組み込まれたワイヤレス暗視カメラは、ワイヤレス送信機で構成されています。画像源にIR光を提供するために使用されるIRLEDのクラスターが配置されます。 IRライトが好まれる理由は、夜間は通常暗く、どのカメラも照明に光を必要とするため、すべてのオブジェクトが一定範囲の赤外線を放射するため、赤外線が最も好ましいオプションです。カメラは12Vバッテリーで駆動され、これらの画像をキャプチャして、テレビユニットに接続されたレシーバーユニットに送信します。画像は送信機ユニットによってデジタル信号に変換され、受信機ユニットはこれらのデジタル信号を受信して画像に再変換し、これらの画像またはビデオはテレビユニットで監視および分析されます。

暗視カメラを備えたロボットの基本的な動作を示すブロック図
戦場スパイロボットの制御
ロボットの制御全体はリモートで行われます。これは、必要な情報を受信機セクションに送信する送信機セクションで構成されています。ロボットは、送信機側のいくつかのボタンを押すだけでカバーされます。
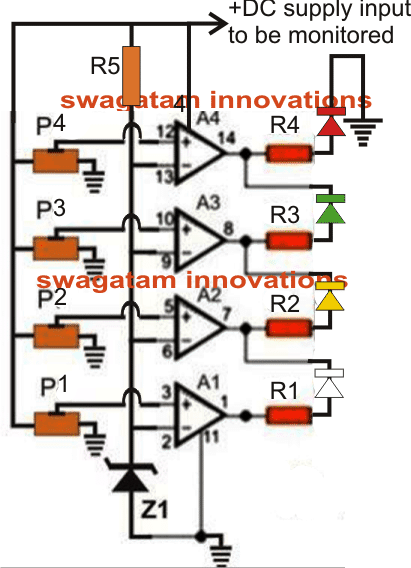
“同相信号除去比オペアンプ ”

戦場スパイロボットの送信機を示すブロック図
トランスミッタユニットは、プッシュボタンを介してマイクロコントローラから入力されたパラレルデータを受信し、RFモジュールを介してこのパラレルデータをシリアル形式で送信するエンコーダで構成されています。それぞれの押しボタンを押すと、マイクロコントローラーは関連する信号をエンコーダーに並列形式で送信するようにプログラムされています。エンコーダは、これらのパラレル信号をシリアル形式に変換して、RFモジュールによって送信されます。このシリアルデータは、RF送信機を使用してキャリア信号で変調され、送信機になります。たとえば、左ボタンを押すと、マイクロコントローラーはエンコーダーとRFモジュールを介して受信ユニットにコマンドを送信します。

戦場スパイロボットの受信機を示すブロック図
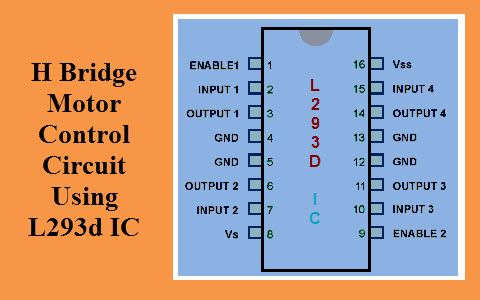
受信機ユニットは、受信信号を復調するRF受信機モジュールと、RF受信機モジュールを介してシリアルデータを受信し、それを並列形式に変換するデコーダーで構成されています。マイクロコントローラーはこのデータを使用して、モータードライバーICに適切な制御信号を送り、2つのモーターの動作を制御します。したがって、カメラが同時に動作している間、モーターを制御することにより、ロボットを前進または後進させることができます。
軍用ロボット
戦場のロボットについて簡単に説明したので、防衛用の実用的なロボットについて簡単に思い出してみましょう。
軍事作戦で使用されるロボットの基本的な機能の1つは、完全に自動化されていないことです。それらは実際には人間によって遠隔操作されています。ロボットまたは無人機械と呼ばれるものは、センサー、LIDARS(レーザーベースの通信レーダー)、カメラなどの必要なすべての機器を備えた任意の移動物体または飛行飛行機です。それらの操作は、爆弾の処分から敵の調査までです。テリトリー。
軍事作戦で使用される無人機には3種類あります。
- 無人地上車両(UGV):地上目的で使用されます。重い荷物を運んだり、凹凸のある地形を移動したり、さまざまなセンサーやカメラを取り付けたりすることができます。

グラディエイタータクティカルUGV
- 無人航空機(UAV):空中兵器を運ぶために使用され、基本的には飛行機械です。

MQ-9リーパー無人航空機
- 無人海中ドローン(UUV):基本的には、水中を調査できる潜水艦または機械です。

タリスマンUUV
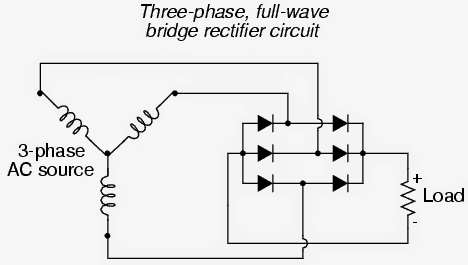
“DCをACに変換する方法 ”
戦場のロボットについての知識が得られたので、次に知る作業に取り掛かりましょう。 ロボットの使用について 私たちの国の軍事作戦で、そして私たちの防衛組織はこの分野でどのように進歩していますか?
写真クレジット:





{kind=link}
{kind=link}