この投稿では、標準のBLDCモータードライバー回路といくつかの高出力BLDCモーターを使用して簡単な電動車椅子を作成する方法を学びます。
前書き
電動車椅子の導入は、ボタンを押すだけで簡単に移動したり移動したりすることがはるかに簡単になった、さまざまな障害を持つ多くの友人にとって恩恵のようなものでした。
車椅子の設計における唯一の費用がかかり複雑な部分は、人間工学的計算と車輪機構の効率ですが、システムを制御するための電子機器は、比較的安価で複雑ではないようです。
製造業者が車椅子の最も効果的な人間工学的設計にアクセスできる場合、システムの電気/電子セクションの作成は、次の説明で説明する手順を実装することで迅速に実装できます。
“和kマップの積 ”
仕様
電動車椅子を作るために必要な主なコンポーネントは、次のリストのとおりです。
1)BLDCモーター-2nos(各250ワット)

2)車椅子本体の組み立て
3)BLDCドライバー回路
4)ディープサイクルバッテリーまたはできればリチウムイオン-24V60AHごとに2個
“測定誤差の種類 ”

BLDCドライバー回路を除いて、残りの材料は市場から既製で調達できます。
このウェブサイトで多くのBLDCドライバー回路を紹介しましたが、モーターの仕様と電力処理能力の点で柔軟な機能を備えているため、より有望で効果的に見えるものを選択します。
前回の投稿では、比較的単純でありながら ICML4425を使用したユニバーサルBLDCドライバ回路 、現在の電動車椅子モータードライバー回路にも同じ設計を採用します。
センサーレス仕様のため、この回路では、センサーの有無に関係なく、モーターの駆動に必要な電流(Amp)制限に制約されることなく、あらゆるタイプの3相モーターを組み込むことができます。
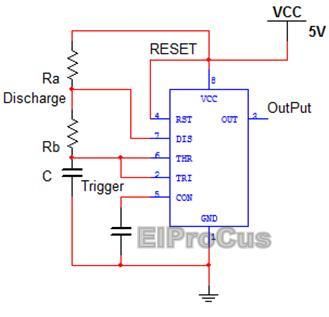
完全な回路図は、次の画像で確認できます。
回路図

ザ・ 上記のセンサーレスBLDCドライバーの技術仕様 以前の投稿ですでに説明されているので、詳細を学ぶために同じものを参照することができます。
制御は実際には非常に簡単で、車椅子を操作するユーザーが楽に制御および操作できるようになります。
RUN / BRAKEスイッチは、オペレーターが必要なときにいつでも車椅子を即座に停止するために使用できる単一の頑丈なDPDTスイッチにすることができます。
ホイールチェアの速度は、R18ノブを時計回り/反時計回りにスライドさせるだけで簡単に制御できます。このポットは、以下に示すように、非常に高品質である必要があり、できればマルチターンタイプである必要があります。
ポテンショメータの仕様

供給電圧は24Vから80Vまでの広い範囲です。つまり、より多くのバッテリーを直列に接続して高電圧定格のモーターを動作させることができます。これにより、メーカーはより小さなサイズのモーターとバッテリーを組み込むことができ、コンパクトで軽量な車椅子が保証されます。 。
後輪に結合された両方のモーターを並列に結合し、上記のBLDCドライバー回路を使用して駆動することができます。
BLDCモーターを使用した上記の電動車椅子回路についてご不明な点がございましたら、下記の検索ボックスでお気軽にお問い合わせください。
更新:
上記の設計には重要なモーター反転機能がありません。反転機能を備えた改良された設計は、次のpdfデータシートに記載されています。
https://www.elprocus.com/wp-content/uploads/2018/04/BLDC-driver.pdf
ビデオクリップ:
前:逆起電力を使用した高電流センサーレスBLDCモーターコントローラー 次へ:クランク懐中電灯のしくみ