サーボ電圧安定器
サーボする 電圧安定器 は、不平衡状態による入力の変動にもかかわらず、平衡3相または単相電圧出力を維持するのに役立つ閉ループ制御メカニズムです。ほとんどの産業用負荷は3相誘導モーター負荷であり、実際の工場環境では、3相の電圧が平衡化されることはめったにありません。たとえば、測定された電圧が420、430、および440Vの場合、平均は430Vで、偏差は10Vです。
不均衡のパーセンテージはによって与えられます
(10V X 100)/ 430V = 2.3%1%の電圧不平衡により、モーター損失が5%増加することがわかります。
“電源用サージ保護回路 ”
したがって、電圧の不均衡はモーター損失を2%から90%に増加させる可能性があり、したがって温度も過度に上昇し、その結果、損失がさらに増加し、効率が低下します。したがって、3つのフェーズすべてでバランスの取れた出力電圧を維持するプロジェクトを取り上げることが提案されています。
単相:
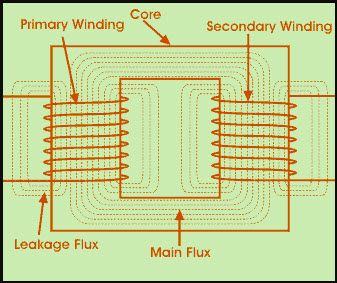
これは、入力にA.C電圧をベクトル加算する原理に基づいており、2次側が入力電圧と直列に接続されているBuck-Boostトランス(T)と呼ばれるトランスを使用して目的の出力を取得します。その一次側は、モーターに取り付けられた可変変圧器(R)から供給されます。一次電圧と二次電圧の比率に応じて、二次電圧の誘導電圧は、に基づいて同相または逆相になります。 電圧変動 。可変変圧器は通常、両端の入力電源から給電されますが、巻線の約20%でのタッピングは、昇降圧変圧器の一次側の固定点と見なされます。したがって、オートトランスの可変点は、バッキング動作に使用される20%の逆相電圧を供給でき、入力電圧と同相でブースト動作に使用される80%を供給することができます。可変変圧器のワイパーの動きは、1対のトライアックを介してその分割相巻線に供給される同期モーターの回転方向を決定する制御回路への出力電圧を検出することによって制御されます。
3相平衡入力補正:
約10KVAの低容量動作の場合、現在、可変変圧器自体の昇降圧変圧器を排除する二重巻線バリアックが使用されていることがわかります。これにより、バランスが2次巻線に使用されるため、バリアックのワイパーの動きが250度に制限されます。これによりシステムは経済的になりますが、信頼性の点で重大な欠点があります。業界標準では、このような組み合わせは受け入れられません。適度にバランスの取れた入力電圧の領域では、安定した出力のために三相サーボ制御補正器も使用されますが、1つの同期モーターと3つのうちの2相電圧を検出する単一の制御カードによって取り付けられた単一の三相バリアックが使用されます。入力フェーズのバランスが適切であれば、これははるかに経済的で便利です。深刻なアンバランスが発生している間、出力が比例してアンバランスになるという欠点があります。
三相不平衡入力補正:
3つの直列変圧器(T1、T2、T3)が毎秒使用され、各相に1つずつ、入力供給電圧に電圧を加算または減算して各相に定電圧を供給し、それによって不平衡入力から平衡出力を生成します。直列変圧器の一次側への入力は、各相から各可変単相変圧器(Variac)(R1、R2、R3)から供給され、そのワイパーはそれぞれAC分割相(2コイル)同期モーター(M1、M2)に結合されます。 M3)。モーターは、時計回りまたは反時計回りに回転するサイリスタスイッチングを介して各コイルのAC電源を受け取り、同相または逆相のいずれかで、バリアックから直列変圧器の一次側への必要な出力電圧を有効にして、加算または減算を実行します。必要に応じて、直列トランスの2次側で、出力で一定のバランスの取れた電圧を維持します。出力から制御回路(C1、C2、C3)へのフィードバックは、オペアンプで形成されたレベルコンパレータによって固定基準電圧と比較され、モーターを作動させる必要に応じて最終的にトライアックがトリガーされます。
この方式は、主に制御回路、各相の直列変圧器のバリアック給電一次側に結合された1つの単相サーボ誘導モーターで構成されています。
- トランジスタの周りに配線されたウィンドウコンパレータとIC741によるRMSエラー信号電圧増幅で構成される制御回路はMultisimに装備され、さまざまな入力動作条件でシミュレートされ、コンデンサの位相シフト誘導モーターを動作させるトライアックの起動が必要な方向であることを確認しますバリアックワイパーの回転を制御します。
- 直列変圧器と制御変圧器は、電圧変動の最大値と最小値に基づいて、市販の鉄心と超エナメル銅線のサイズに一致する標準式を使用して設計されてから、プロジェクトで使用します。
技術:
平衡三相電力システムでは、すべての電圧と電流の振幅が同じであり、互いに120度位相シフトされます。ただし、電圧の不均衡は機器や配電システムに悪影響を与える可能性があるため、実際には不可能です。
不均衡な条件下では、配電システムはより多くの損失と加熱効果を被り、安定性が低下します。電圧の不均衡の影響は、誘導モーター、パワーエレクトロニクスコンバーター、調整可能な速度ドライブ(ASD)などの機器にも悪影響を与える可能性があります。三相モーターの電圧不平衡の割合が比較的小さいと、モーター損失が大幅に増加し、効率も低下します。電圧の不均衡によって失われるモーターのワット数を減らすことにより、多くのアプリケーションでエネルギーコストを最小限に抑えることができます。
パーセント電圧不平衡 NEMAは、平均電圧からの線間電圧の偏差を平均電圧で割った値の100倍として定義しています。測定電圧が420、430、440Vの場合、平均は430V、偏差は10Vです。
パーセンテージの不均衡はによって与えられます (10V * 100 / 430V)= 2.3%
したがって、1%の電圧不平衡は、モーター損失を5%増加させます。
したがって、不平衡は深刻な電力品質の問題であり、主に低電圧配電システムに影響を及ぼします。したがって、プロジェクトでは、すべての相の大きさに関して平衡電圧を維持し、平衡線間電圧を維持することが提案されています。
前書き:
A.C.電圧安定器は、安定したACを得るためのものです。変動入力メインからの供給。彼らは、電気、電子、および他の多くの産業、研究機関、試験所、教育機関などのあらゆる分野でアプリケーションを見つけます。
アンバランスとは:
不平衡状態とは、3相の電圧と電流の振幅や位相シフトが同じでない状態を指します。
これらの条件のいずれかまたは両方が満たされない場合、システムは不平衡または非対称と呼ばれます。 (このテキストでは、波形は正弦波であり、したがって高調波を含まないと暗黙的に想定されています。)
不均衡の原因:
システムオペレータは、PCCで配電網と顧客の内部ネットワークの間でバランスの取れたシステム電圧を提供しようとします。
三相システムの出力電圧は、発電機の出力電圧、システムのインピーダンス、および負荷電流に依存します。
ただし、ほとんどが同期発電機を使用しているため、発電電圧の対称性が高く、発電機が不均衡の原因となることはありません。より低い電圧レベルでの接続は通常、インピーダンスが高く、電圧の不均衡が大きくなる可能性があります。システムコンポーネントのインピーダンスは、架空送電線の構成の影響を受けます。
電圧不平衡の結果:
不均衡に対する電気機器の感度は、アプライアンスごとに異なります。最も一般的な問題の概要を以下に示します。
(a)誘導機:
これらはエアコンです。内部に誘導された回転磁界を備えた同期機。その大きさは、直接成分および/または逆成分の振幅に比例します。したがって、不平衡電源の場合、回転磁界は円形ではなく楕円形になります。したがって、誘導機は主に電圧の不均衡により3種類の問題に直面します
1.まず、負のシーケンスシステムの逆回転磁界が負のブレーキトルクを生成するため、マシンは最大トルクを生成できません。負のブレーキトルクは、通常の回転磁界にリンクされたベーストルクから差し引く必要があります。次の図は、不平衡供給下での誘導機のさまざまなトルクスリップ特性を示しています。

2.次に、システム周波数が2倍になると、トルク成分が誘発されるため、ベアリングが機械的損傷を受ける可能性があります。
3.最後に、固定子、特に回転子が過度に加熱され、熱劣化が速くなる可能性があります。この熱は、ローターから見た、(相対的な意味での)高速回転する逆磁場による大きな電流の誘導によって引き起こされます。この余分な加熱に対処できるようにするには、モーターの定格を下げる必要があります。これには、より大きな電力定格のマシンを取り付ける必要がある場合があります。
テクノエコノミクス:
電圧の不均衡は、モーターの早期故障を引き起こす可能性があり、システムの予定外のシャットダウンにつながるだけでなく、大きな経済的損失も引き起こします。
銘板に記載されている電圧以外の電圧を使用した場合に予想される、モーターに対する低電圧と高電圧の影響、および関連するパフォーマンスの変化を以下に示します。
低電圧の影響:
モーターが銘板定格を下回る電圧にさらされると、モーターの特性の一部がわずかに変化し、その他は劇的に変化します。
ラインから引き出される電力量は、一定量の負荷に対して固定する必要があります。
モーターが消費する電力量は、電圧と電流(アンペア)と大まかな相関関係があります。
同じ電力量を維持するために、供給電圧が低い場合、電流の増加が補償として機能します。ただし、電流が大きくなるとモーターに熱が蓄積し、最終的にモーターが破壊されるため、危険です。
したがって、低電圧を印加することの欠点は、モーターの過熱とモーターの損傷です。
印加電圧の2乗に基づく、主要負荷(誘導電動機)の始動トルク、プルアップトルク、およびプルアウトトルク。
一般に、定格電圧から10%低下すると、始動トルク、プルアップ、およびプルアウトトルクが低くなる可能性があります。
高電圧の影響:
高電圧は磁石を飽和させ、モーターに過剰な電流を流して鉄を磁化させる可能性があります。したがって、高電圧も損傷につながる可能性があります。高電圧は力率も低下させ、損失の増加を引き起こします。
モーターは、設計電圧を超える電圧の特定の変更を許容します。設計電圧を極端に超えると、電流が上昇し、それに対応して加熱が変化し、モーターの寿命が短くなります。
電圧感度は、モーターだけでなく他のデバイスにも影響します。リレーやスターターに見られるソレノイドとコイルは、高電圧よりも低電圧に耐えます。他の例としては、蛍光灯、水銀灯、高圧ナトリウムランプのバラスト、変圧器、白熱灯などがあります。
全体として、入力変圧器のタップを変更して、プラントフロアの電圧を機器の定格に近い値に最適化すると、機器にとってより良いものになります。これは、プロジェクトで提案されている電圧安定化の概念の背後にある主要な概念です。
供給電圧を決定するための規則
- 小型モーターは、大型モーターよりも過電圧と飽和に敏感になる傾向があります。
- 単相モーターは、三相モーターよりも過電圧に敏感になる傾向があります。
- Uフレームモーターは、Tフレームよりも過電圧の影響を受けにくくなっています。
- プレミアム効率のSuper-Eモーターは、標準効率のモーターよりも過電圧の影響を受けにくくなっています。
- 2極および4極モーターは、6極および8極設計よりも高電圧の影響を受けにくい傾向があります。
- 過電圧は、負荷の軽いモーターでもアンペア数と温度を上昇させる可能性があります
- 低電圧または高電圧で効率が低下するため、効率も影響を受けます
- 力率は高電圧で減少します。
- 突入電流は電圧が高くなると上昇します。
いくつかのミニを行うことにより、さまざまな電子概念と回路に関するより多くの知識を得る エレクトロニクスプロジェクト エンジニアリングレベルで。