ロボットは高度で高度にインテリジェントな電気機械デバイスであり、多くの日常業務を実行できることがわかっています。このデバイスは、周囲に反応し、特定のタスクを達成するためのアクションを実行できます。ロボットはさまざまなコンポーネントで作られていますが、重要なコンポーネントの 1 つはアクチュエータです。一般に、アクチュエータは、電子アクセス制御システム、携帯電話のバイブレータ、家電製品、車両、ロボット、産業用デバイスなど、身の回りのほぼすべての機械で使用されています。一般的なアクチュエータの例は次のとおりです。 電気モーター 、ジャッキスクリュー、ステッパーモーター、ロボット内の筋肉刺激装置、その他多数。この記事では、 ロボットアクチュエータ – アプリケーションの操作。
ロボットアクチュエータとは
ロボットの車輪やロボットアームの関節を回転させたり、ロボットのグリッパを開閉したりするために使用されるアクチュエータをロボットアクチュエータと呼びます。関連する負荷に基づいて、さまざまなタイプのロボットアクチュエータを利用できます。一般に、負荷は、トルク、力、精度、動作速度、消費電力、精度などのさまざまな要因に関連付けられています。ロボット アクチュエータの動作原理は、エネルギーを物理的な動きに変換することであり、ほとんどのアクチュエータは直線または回転運動を生成します。
ロボットアクチュエータの種類
ロボットアクチュエータは、直線運動と回転運動のような運動の要件に応じて 2 つのタイプに分類されます。
直線運動の場合:
ロボットで直線運動活動に使用されるアクチュエータには 2 種類あります。リニアアクチュエーターとソレノイドアクチュエーター。
リニアアクチュエータ
ロボット工学のリニアアクチュエータは、ロボットを前後に動かしたりアームを伸ばしたりするために使用されます。このアクチュエータのアクティブ エンドは、ロボットのレバー アームに接続されているだけで、そのようなモーションをアクティブにします。これらのアクチュエータは、ロボット産業の多くのアプリケーションで使用されています。

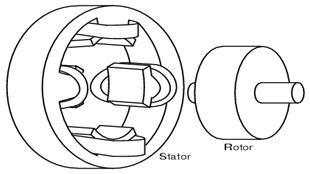
ソレノイドアクチュエータ
ソレノイド アクチュエータは、電磁活動に作用するソレノイド ラッチを含む特殊用途のリニア アクチュエータです。これらのアクチュエータは、主にロボットの動きを制御するために使用され、スタートとリバース、ラッチ、押しボタンなどのさまざまなアクティビティも実行します。ソレノイドは通常、ラッチ、バルブ、ロック、押しボタンのアプリケーションで使用されます。通常は外部マイクロコントローラによって制御されます。


回転運動の場合:
回転運動活動のためにロボットで使用されるアクチュエータには 3 つのタイプがあります。 DCモーター、サーボモーター、ステッピングモーター。
DCモーターアクチュエーター
DC モーター アクチュエーターは、一般的に回転ロボットの動作に使用されます。これらのアクチュエータは、トルク生成機能を備えたさまざまなサイズで利用できます。したがって、回転運動全体で速度を変更するために利用できます。これらのアクチュエータを使用することで、ロボット掘削やロボット ドライブ トレインの動作などのさまざまなアクティビティが実行されます。

サーボアクチュエータ
ロボット工学のサーボ モーター アクチュエーターは、主に回転運動の制御と監視に使用されます。これらは 360 度回転できる非常に優れた DC モーターですが、連続回転は必須ではありません。このアクチュエータは、回転運動全体を通して簡単に停止できます。このアクチュエーターを使用することで、 ピックアンドプレイスのようなアクティビティが実行されます .方法を知るために ピック N プレイス ロボット リンクをクリックしてください。

ステッピング モーター アクチュエーター
ステッピング モーター アクチュエーターは、ロボット内の反復的な回転活動に貢献するのに役立ちます。したがって、これらのタイプのアクチュエータは、DC およびサーボ モーター アクチュエータの両方を組み合わせたものです。これらのステッピング モーター アクチュエーターは、活動の再現性が必要なオートメーション ロボットで使用されます。

ロボット アクチュエータの設計
ロボットに使用されるアクチュエータにはさまざまな種類があることがわかっています。ここでは、回転運動を引く/押す直線運動に変えるためにロボット工学で使用される線形アクチュエータを設計する方法について説明します。したがって、この動きを使用して、材料または機械をスライド、落下、傾斜、または持ち上げることができます。これらのアクチュエータは、非常に効率的でメンテナンスフリーのクリーンで安全なモーションコントロールを提供します。

力
ロボット アクチュエータを設計する際の最初の考慮事項は、電力です。機械的な動力を得るには、動力を取り込むことが不可欠です。したがって、機械的な動力の量は、移動する負荷または力によって定義できます。
デューティサイクル
デューティサイクルは、アクチュエータが動作する頻度と使用する時間として定義できます。デューティ サイクルは、動作中のアクチュエータの温度によって決定されます。これは、熱によって電力が失われるためです。
すべてのアクチュエータが同じではない場合、デューティ サイクル内に違いがあります。もう 1 つの要因は負荷です。これは特に DC モーターに当てはまりますが、デューティ サイクルを決定できるその他の要因は、負荷特性、使用年数、周囲温度です。
効率
アクチュエータの効率は、動作中にアクチュエータがどのように機能するかを理解するのに役立ちます。したがって、アクチュエータの効率は、電力によって生成された機械力を分離することによって求められます。
アクチュエータの寿命
アクチュエータの寿命を延ばす多くの要因があります。定格デューティ サイクルを維持し、側負荷を減らし、推奨される電圧、力、および極端な環境を維持します。
働く
ロボットアクチュエータは、主に使いやすさと効率性を考慮して設計されています。リニア ロボット アクチュエータの設計は、ねじ付き送りねじから始まる傾斜面です。このネジは、負荷を移動するためのより大きな距離とともに機能する力を生成するためのランプを提供します。ロボット アクチュエータの設計の主な目的は、プル/プッシュ モーションを提供することです。したがって、運動を提供するために必要なエネルギーは、手動または電気、流体、空気などのエネルギー源です。これらのアクチュエータは通常動きます カーシートの前後、自動ドアの開閉、コンピューターのディスクドライブの開閉。
ロボット アクチュエータの故障
ロボットアクチュエータの故障は、主に多くの理由で発生します。そのため、これらのアクチュエータは、ジョイントの固着やロックされた自由にスイングするジョイント、および作動効率の全体的または部分的な損失など、さまざまな障害を経験する可能性があります。そのため、ロボットのコントローラが十分な耐障害性を備えて設計されていない場合、これらの障害はロボットの動作に影響を与えます。
ロボットのアクチュエーターの選び方
ロボットアクチュエータはさまざまな目的で使用されるため、アクチュエータを選択する際には考慮すべき多くの側面があります。
目的と意図する機能
特定のアプリケーションに必要なアクチュエータのタイプは、主にロボットの目的と意図する機能によって異なります。
物理的な要件と制約
使用するアクチュエータのタイプが決定されるたびに、開発者は物理的な要件と制約を確認する必要があります。アクチュエータの重量と物理的サイズは、アクチュエータをロボットに配置する際に重要な役割を果たすため、そうしないと、小さなロボット アームに重いアクチュエータを取り付けると、アームが自重で故障する可能性があります。
ストレングス&パワー
特定の用途に基づいて、開発者はタスクを実行するために特定のアクチュエータの強度とパワーを確保する必要があります。
通信プロトコル
ロボットのアクチュエータを選択する際には、通信プロトコルも考慮する必要があります。多くのアクチュエータは、単に PWM (パルス幅変調) 一方、一部のアクチュエータはシリアル通信をサポートしています。
取付スペースとオプション
開発者は、ロボット内またはロボット上で得られる取り付けスペースと、アクチュエータ自体によって提供される取り付けオプションを確認する必要があります。一部のタイプのアクチュエータは、ユニットをさまざまな方向に取り付けることができる個別の取り付けハードウェアを使用できますが、他のタイプは、特定の位置と方向に取り付けられる統合取り付けポイントを使用できます。
利点
ロボットアクチュエータの利点 次のものが含まれます。
- 低コスト
- そのメンテナンスは簡単です。
- これらは正確です。
- コントロールしやすい。
- 電力変換効率が高い。
- 安全で操作が簡単
- ノイズが少ない。
- これらは非常にクリーンで、大気への汚染が少ないです。
- これらはメンテナンスが非常に簡単です。
ロボットアクチュエータの欠点 以下のものが含まれます。
- 一定条件下での過熱。
- 可燃性環境では特別な安全が必要です。
- 適切なメンテナンスが必要です。
- 液体の漏れは生態学的問題を引き起こします。
- ラウド&ノイジー。
- 精度管理の欠如。
- これらは振動に非常に敏感です。
ロボットアクチュエータの用途
ロボットアクチュエータの用途としては、次のようなものがあります。
“escは何をしますか ”
- アクチュエータは、制御信号に応じて外部エネルギーを物理的な動きに変えるロボット工学の非常に重要なコンポーネントです。
- ロボット工学の電気アクチュエータは、電気エネルギーを回転運動または直線運動に変換するために使用されます
- アクチュエータは、ロボットがこの力を使用して自分自身や他のオブジェクトを動かす力を生成します。
- アクチュエータは、移動および屈曲が必要なロボット工学、デバイス、または義手と関連付けられています。
- ロボット工学内のリニア アクチュエータは、電気エネルギーを直線運動に変換します。
- アクチュエータは、システムまたはメカニズムの制御と移動を担当します。
したがって、これはすべてロボットに関するものです アクチュエータ – 作動中 アプリケーションで。 ロボット内のアクチュエータは、ロボットがロボットを回転させたり、アームを上下させたり、エネルギーを機械的な動きに変えたりするための関節として機能する重要なコンポーネントです。 .アクチュエータに動力を供給する最も一般的なエネルギー源は電気ですが、空圧および油圧エネルギーも利用できます。そのため、独自の油圧式アクチュエータを使用して高出力を生成し、耐衝撃性を備えています。ここで質問です。ロボットで使用されるさまざまなコンポーネントは何ですか?