この記事では、マイクロ波センサーIC KMY 24を研究し、その主な機能とピン配置の実装の詳細を理解しようとします。
ドップラーセンサーKMY24のしくみ
KMY24マイクロ波センサーモジュールは、ドップラー効果の概念に基づいて設計および構築されています。正しく構成されている場合、有向ゾーン全体で約2.45GHzの低電力マイクロ波信号を放射します。
人間でさえあり得る物体(ターゲット)が放出された信号の範囲内に入ると、信号は元の周波数に対していくらかの外乱を伴ってセンサーモジュールに反射されます。これは一般にドップラーシフトとして知られています。


この反射周波数シフトがセンサーによって検出されると、内蔵回路は反射周波数を既存の元の周波数と即座に混合し、指定された出力全体で2つの個別の周波数を生成します。
ドップラー効果とは
ドップラー効果の原理に従って、この周波数位相シフトは、センサーゾーン内のオブジェクトがセンサーに後退しているか、センサーに接近しているかに応じて、正または負のいずれかになります。
KMY24の機能はここで終了し、デバイスからの出力は、適切な電圧増幅器構成、たとえば差動オペアンプ回路などを介して増幅する必要があります。
さらに、オペアンプの出力は、検出されたパラメータを区別または識別するためのリレーステージまたはレコーダまたはアラームで適切に終了することができます。
ICの技術的特徴
IC KMY24の主な機能は、次のように学習できます。
- 比較的小さなターゲットがゾーンに近づいた場合でも、高感度と検出。
- ターゲットの方向性のある動きの検出を可能にするツインミキサー回路
- 確実な結果を達成するための高い信頼性
- 消費電力が少ないため、バッテリー駆動のアプリケーションに最適です。
- 大気中のRF妨害を低減するための最小限の高調波放射。
- コンパクトサイズ。
次の画像は、KMY24マイクロ波センサーのピン配置の詳細を示しています
マイクロ波センサーICのピン配列詳細

次の画像は、ICに適用する必要のあるブレークダウンパラメータまたは絶対最大電圧および電流定格を示しています。これらのパラメータを超えてはなりません。正確には、これらを表示値より十分に低く保つ必要があります。
最大電気公差仕様

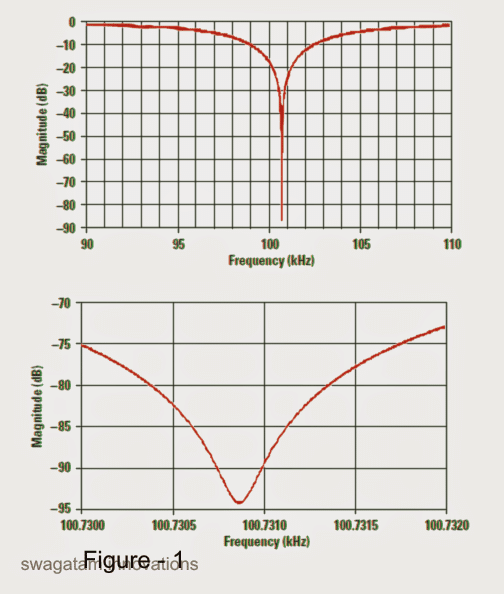
以下に示す2つの画像は、ターゲットが接近しているとき(下の最初の画像)とターゲットが後退または後退しているとき(下の2番目の図)の元の放射周波数に対する反射周波数の位置の位相シフトまたは位置の違いを示しています。 )。
位相シフトの違いの分析


次の(今後の)記事では、実際の回路を介してマイクロ波センサーを使用する方法について理解しようとします。
前:マイクロコントローラーなしのリモート制御トロリー回路 次へ:GHzマイクロ波レーダーセキュリティ警報回路の作り方