
低コスト、頑丈な設計、複雑さの軽減、ACモーターの保守の容易さなど、いくつかの利点により、多くの産業用操作が次の用途で実行されます。 ACドライブ DCドライブより。 AC誘導電動機は、始動、速度制御、保護などの点で独自の典型的な特性と性能を備えた特殊なタイプの電気モーターです。

AC誘導モーター
幅広い性能 アプリケーションは三相誘導モーターを作ります 産業用駆動システムの設置容量の85%を占めています。このモーターの基本的な情報とSVPWMの特別な制御技術について説明しましょう。
三相AC誘導モーター
三相AC誘導モーターは、三相電源で動作するように設計された回転電気機械です。この三相モーターは非同期モーターとも呼ばれます。これらのACモーターには2つのタイプがあります。 リス・スリップリング型誘導電動機 。このモーターの動作原理は、回転磁界の生成に基づいています。
三相誘導電動機の構造
これらの三相モーターは、固定子と回転子で構成されており、その間に電気接続はありません。これらの固定子と回転子は、ヒステリシスと渦電流損失を低減するために、高磁性コア材料を使用して構築されています。

三相誘導電動機の構造
固定子フレームは、鋳鉄、アルミニウム、または圧延鋼を使用して構築できます。固定子フレームは、固定子積層コア、巻線、およびその他の換気装置に必要な機械的保護とサポートを提供します。固定子は、スロット付きラミネーションに取り付けられた120度の位相シフトで互いに重なり合う三相巻線で巻かれています。 3つの巻線の6つの端が引き出されて端子ボックスに接続され、これらの巻線が三相主電源によって励起されます。
これらの巻線は、絶縁されたスロット付きラミネーションに取り付けられたワニスで絶縁された銅線です。すべての使用温度で、この含浸ワニスは堅いままです。これらの巻線は、絶縁抵抗が高く、塩水雰囲気、湿気、アルカリ性ガス、オイル、グリースなどに対して高い耐性があります。これらの巻線は、電圧レベルに適したもののいずれかで接続されています。 スター接続またはデルタ接続 。

かご形誘導電動機
三相交流誘導電動機の回転子は、スリップリング誘導電動機とかご形誘導電動機で異なります。スリップリングタイプのローターは、円筒形ローターの両端で短絡された重いアルミニウムまたは銅のバーで構成されています。誘導電動機のシャフトは、固定子内で自由に回転できるように、また摩擦を減らすために、両端の2つのベアリングで支えられています。それは、その円周の周りに打ち抜かれた等間隔のスロットのスチールラミネーションのスタックで構成され、その中に非絶縁の重いアルミニウムまたは銅のバーが配置されます。
スリップリングタイプのローターは、一方の端が内部でスター付きの三相巻線で構成され、もう一方の端は外側に出され、ローターシャフトに取り付けられたスリップリングに接続されます。そして、高い始動トルクを発生させるために、これらの巻線はカーボンブラシの助けを借りてレオスタットに接続されています。この外部抵抗またはレオスタットは、開始期間にのみ使用されます。モーターが通常の速度に達すると、ブラシが短絡し、巻かれたローターがかご形ローターとして機能します。
三相誘導電動機の動作原理

三相誘導電動機の動作原理
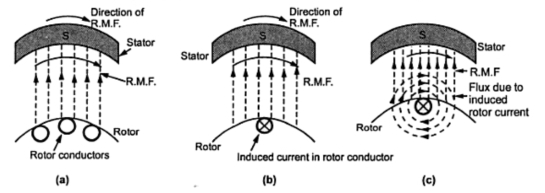
- モーターが三相電源で励起されると、三相固定子巻線は、同期速度で回転する一定の大きさで120の変位を持つ回転磁界を生成します。この変化する磁場は、ファラデーの電磁誘導の法則の原理に従って、回転子導体を切断し、それらに電流を誘導します。これらの回転子導体が短絡すると、電流がこれらの導体を流れ始めます。
- 固定子の磁場が存在する場合、回転子導体が配置されるため、ローレンツ力の原理に従って、機械的な力が回転子導体に作用します。したがって、すべてのローター導体力、すなわち、機械的力の合計がローターにトルクを生成し、それが回転磁場の同じ方向にローターを動かす傾向がある。
- この回転子導体の回転は、回転子の誘導電流がその生成の原因に対抗することを示すレンツの法則によっても説明できます。ここでは、この対抗は回転磁界です。この結果、ローターはステーターの回転磁界と同じ方向に回転し始めます。回転子の速度が固定子の速度よりも大きい場合、回転子の回転の理由は回転子と固定子の磁場の相対速度であるため、回転子に電流は誘導されません。この固定子と回転子の界磁差はスリップと呼ばれます。これは、固定子と回転子の間のこの相対速度差のために、3相モーターが非同期機と呼ばれる方法です。
- 上で説明したように、固定子フィールドと回転子導体の間の相対速度により、回転子が特定の方向に回転します。したがって、回転を生成するために、回転子速度Nrは常に固定子界磁速度Nsよりも小さくなければならず、これら2つのパラメーターの差はモーターの負荷に依存します。
AC誘導電動機の速度差またはスリップは次のように与えられます。

- 固定子が静止している場合、Nr = 0であるため、スリップは1または100%になります。
- Nrが同期速度の場合、スリップはゼロになるため、モーターは同期速度で動作しません。
- 無負荷から全負荷までの3相誘導モーターのスリップは約0.1%から3%であるため、誘導モーターは定速モーターと呼ばれます。
三相誘導電動機のSVPWM制御
最も一般的には誘導モーターの制御に、PWMインバーターベースのドライブが使用されます。固定周波数ドライブと比較して、これらは PWMダイブ制御 電圧の大きさと電流の周波数の両方、および誘導モーターに印加される電圧。パワースイッチゲートに印加されるPWM信号を変更することにより、これらのドライブによって供給される電力量も変更され、三相誘導モーターの速度制御が実現されます。

Edgefxkits.comによる3相誘導モーターのSVPWM制御
三相モータードライブを制御するために、いくつかのパルス幅変調(PWM)方式が使用されます。ただし、最も広く使用されているのは、正弦波PWM(SPWM)と空間ベクトルPWM(SVPWM)です。 SPWMと比較して、SVPWM制御は、より高いレベルの基本波電圧と低減された高調波成分を提供します。ここでは、このSVPWM制御の実際の実装を使用して示しました。 8051マイクロコントローラー 。
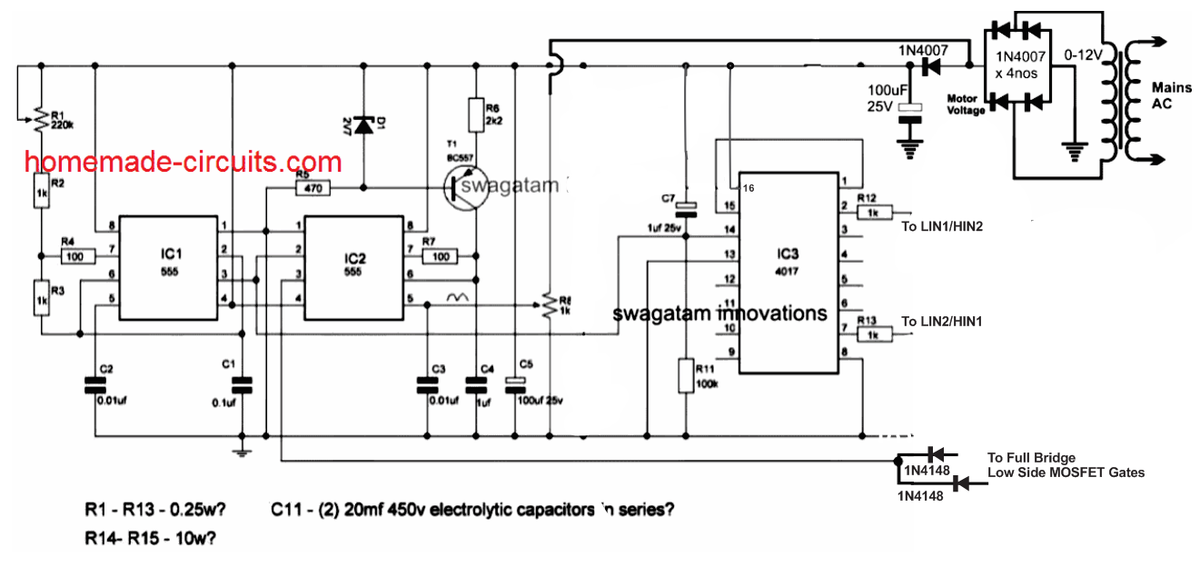
以下の回路では、DCバス電圧に応じて3つの出力電圧を取得するために3レベルの電圧インバータが使用されています。単相電源は、マイクロコントローラー回路とインバーター回路の両方にDC電力を供給するように整流されています。8051マイクロコントローラーは、ゲートドライバーICに与えられるSVPWM信号を生成するようにプログラムされています。

Edgefxkits.comによる3相誘導モーターのSVPWM制御のブロック図
インバータ回路は、可変三相電源を生成するために6つのMOSFETで構成され、各相に対して2つのMOSFETが配置されます。これらのMOSFETゲートはゲートドライバICに接続されています。マイクロコントローラのゲートドライバスイッチからPWM信号を受信すると MOSFET 可変AC出力電圧が生成されるようにします。したがって、電圧と周波数が変化するこの可変ACは変化します モーターの速度 。
これは、構造と動作原理を備えたAC誘導モーターの基本情報です。これに加えて、モーターの速度を制御するSVPWM技術には、上記で見た他のPWM技術よりも多くの利点があります。疑問がある場合 プログラミングマイクロコントローラ SVPWM技術を実装するために、以下にコメントすることによって私達に連絡することができます。
写真クレジット:
- AC誘導電動機 ウィキメディア
- による三相誘導電動機の建設 エレクトロニックデザイン
- スリップリングおよびかご形誘導電動機 tpub
- による三相誘導電動機の動作原理 blogspot





{kind=link}
{kind=link}
{kind=link}