このプロジェクトでは、サーボモーターの基本仕様と、555タイマーICといくつかの押しボタンを使用してサーボモーターを操作する方法を学習します。
アンキット・ネギ
なぜサーボ?
サーボモーター さまざまな分野で使用されています。これらは主に、出力負荷を制御するために正確な動きが必要な領域でアクチュエータとして使用されます。
最良の例はRCカーです。あなたが45度の動きを望んでいるのを見てみましょう。その場合、電源を入れるたびに目的の位置をオーバーシュートするため、単純なDCモーターを使用することはできません。
したがって、このタスクを実行するには、サーボモーターが必要です。これは、正確な45度の回転を行うだけでなく、目的の位置でスムーズに停止するためです。

知っておくべきいくつかの技術的ポイント:
A)サーボを購入または使用する前に、サーボの内容とその動作を理解する必要があります。サーボモーターは、次の3つの主要コンポーネントで構成されています。
1.DCモーター
2. 1ポテンショメータ、アナログまたはデジタル
3.制御回路
B)サーボモーターから出てくるワイヤーは全部で3本あります。
1.赤:供給のプラスへ
2.黒:供給のマイナスに
3.オレンジまたは黄色:基準電圧、つまりpwmソースに接続されています
“8ビット加算器の真理値表 ”
C)サーボモーターはどちらの方向にも90度回転でき、最大180度、つまり中立位置から時計回りに90度または反時計回りに90度をカバーします。
モーターを時計回りに回転させるには、クロックパルスの時間は1.5ミリ秒より大きく、反時計回りに回転させるには1.25ミリ秒未満である必要がありますが、周波数は50〜60ヘルツである必要があります。
したがって、555タイマーを使用して、このようなクロックパルスを生成します。
このプロジェクトに必要なコンポーネント:
1.サーボモーター
二。 555タイマー
3.6ボルトバッテリー
4.2つのプッシュボタン
5.抵抗器:1K、4.7K、33K、10K、68K、すべて1/4ワット5%
6. 1つのトランジスタ(BC547)
7.0.1ufの2つのコンデンサ
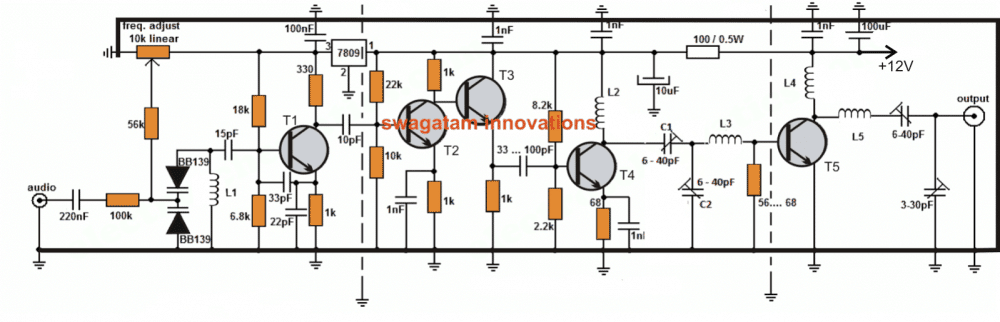
IC 555を使用してサーボモーターを実行する方法を示す回路図:

上図の回路図のように接続してください。
モーターのプラスとマイナスのピンをそれぞれバッテリーのプラスとマイナスの端子に接続します。そして、信号または基準ピンをトランジスタのコレクタ端子に接続します。
回路動作:
1.前進押しボタンが押されたとき-
この場合、68Kの抵抗が放電ピンとしきい値ピンの間に接続されます。ここで、最初はコンデンサが充電されていないため、ピン2は0ボルトであり、印加電圧の1 x3未満です。
これにより、555内のフリップフロップがリセットされ、トランジスタのベースが接続されている出力端子にロジック1が与えられます。
これにより、トランジスタがオンになり、電流が直接グランドに流れます。これにより、このピンがコレクタ端子に直接接続されているため、モーターの信号ピンがゼロボルトになります。
コンデンサは出力が1のときに充電を開始するため、コンデンサの両端の電圧がしきい値ピンに直接接続されているため、印加電圧の2 x 3を超えると、出力は0になります。
“送信機モジュールとは ”
これでトランジスタがオフになり、信号ピンがロジック1になります。
この方法では pwm信号が生成されます モーターの基準ピンで。この場合、生成されたパルスの期間は1.5ミリ秒を超えます。これは、555のデューティサイクル式で計算できます。したがって、上記の段落で説明したように、モーターが時計回りに90度回転します。
1.後方押しボタンが押されたとき-
この場合、放電としきい値ピンの間に10Kの抵抗が接続されます。これは68kオームの抵抗未満です。したがって、この場合、パルスのオン時間は1.5ミリ秒未満であり、555のデューティサイクル式で計算できます。
これで、上記の場合と同じように、モーターの基準ピンでpwmが生成されます。したがって、上記の段落で説明したように、モーターが反時計回りに90度回転します。
**どちらの場合も、周波数は40〜60ヘルツです。
前:2.4 GHz10チャンネルリモートコントロールスイッチ 次へ:コンパクトな3相IGBTドライバーIC STGIPN3H60 –データシート、ピン配置
![非接触AC位相検出器回路[テスト済み]](https://electronics.jf-parede.pt/img/sensors-detectors/38/non-contact-ac-phase-detector-circuit.png)