この投稿では、好ましい一連の動きでインキュベーターモーターメカニズムを操作するための逆順方向タイマー回路について学習します。アイデアはアンワー氏からリクエストされました
技術仕様
私はインドネシア出身です.....高トルクモーター(車のDCモーターパワーウィンドウ)を備えたインキュベータータイマーの回路図が必要です。 DCモーターを終了位置に到達するまで2方向に回転させてから停止し、極性を切り替えて、電源を再投入したときに反対方向に回転するようにしようとしています。次に、もう一方の端でも同じことを行います。
1.タイマーが1分間電源をオンにします。 (7:00 am -7:01 am)
2.モーターは、停止位置、たとえば30秒に達するまで一方向に回転します。
3.停止位置に達するとモーターの電源がオフになり、1分間遅延します。主電源を終了/オフにするタイマー。また、極性を逆にします。
4.次にメインタイマーがオンになると(10:00-10:01)、同じものを逆方向に投入し、継続的に繰り返します
5. 12 VDCモーターリバース(モーター+および-からの2本のケーブルのみ)
6. Rev / Fwdモーター用のLEDインジケーターが必要
助けてくれませんか?
よろしくお願いします。
これは、100%信頼できる必要がある重要なホームプロジェクトです。
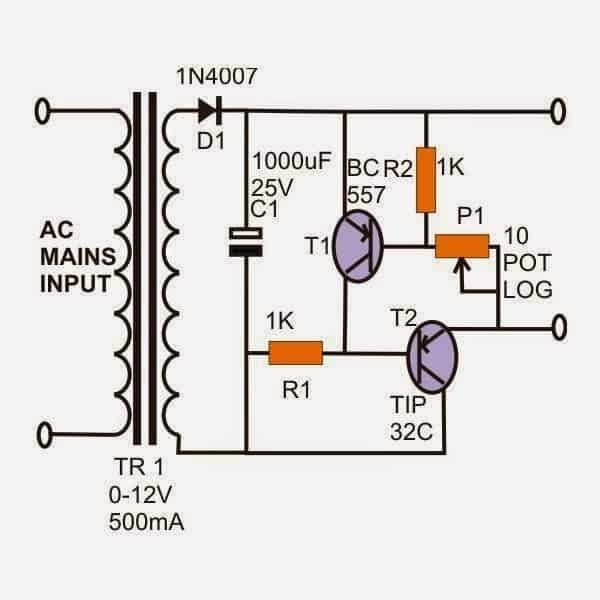
デザイン

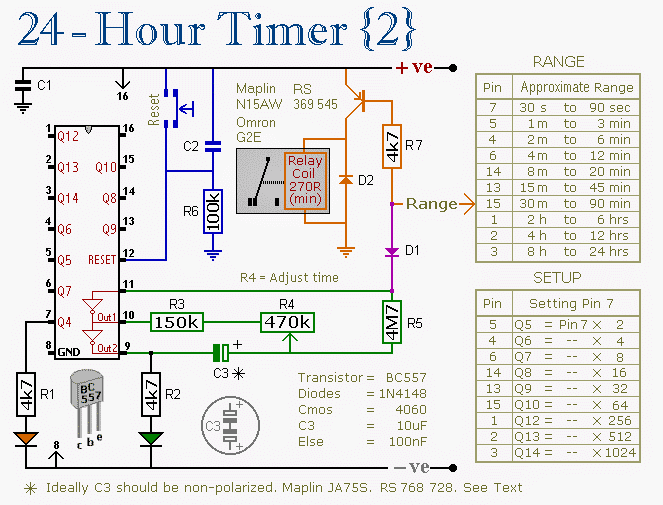
上の図では、所定の時間間隔のセットの後に、インキュベーターモーターの提案された逆前進運動を実装するための設計を視覚化することができます。
電源がオンになった瞬間、次のシナリオがあります。
「設定」用の磁気スイッチは、モーターまたは設計されたインキュベーター機構がゼロ開始位置にある間、非アクティブ状態にあるか、押されていると見なすことができます。
「セット」/「リセット」スイッチは、磁気リードスイッチを使用して実装することが望ましいことに注意してください。
電源がオンになると、IC 4060はC2を介してリセットされ、ゼロからカウントプロセスが開始され、ピン3はゼロロジックになります。
この初期ゼロロジックは、C3を介してT1のベースに供給され、T1のベースは、T3とそれに関連するリレーを強制的にアクティブにします。プロセス中のR7は、T1 / T3がこのモードでラッチされることを確認します。
この時点でのDPDTリレーは、N / O接点で作動し、モーターとメカニズムを想定される「前進」運動に向けて開始します。
モーターが動き始めるとすぐに、「設定」ボタンが放され、T4と上部SPDTが作動する機会が得られます。ここで、SPDTリレーはN / O位置切り替えを行い、DPDTのN / C接点をスタンバイにします。供給..
モーターおよび/またはメカニズムは、「リセット」位置に到達するまで動き続けます。これにより、T2がアクティブになり、T1 / T4ラッチが壊れます。
T4をオフにすると、DPDTリレーはその位置をN / OからN / Cに変更し、モーターメカニズムに反対(逆)の動きを提供します。
インキュベーターモーターメカニズムは、T4のベースドライブをすばやくオフにする「セット」ポイントに達するまで方向を反転し、逆方向の動きを開始します。SPDTはDPDTの切断電源をオフに切り替え、メカニズム全体が停止します。 。
その間、IC 4060は、ピン3でハイロジックを通過した後(C3を放電することにより)、再びゼロロジックを生成するまでカウントを続けます。
サイクルが再び開始され、上記で説明した手順が繰り返されます。
前:ArduinoでLEDを点滅させる–完全なチュートリアル 次へ:ハイパワー産業用メインサージサプレッサーの調査