現在、 産業自動化 、さまざまなタイプのスマート フィールド デバイスが使用されていますが、当局やフィールド エンジニアが業界内ですべてのデバイスを監視することは非常に困難です。したがって、一般的に、この種の監視はスマートデバイスで実現され、業界内外のさまざまな接続デバイス間で主要な監視システムにデータを転送できます。そのため、HART プロトコルは 1980 年に導入され、Bell 202 規格に基づいています。このプロトコルは業界標準になっているため、産業用オートメーションで使用されています。そのため、この記事ではその概要について説明します。 HART プロトコル – アプリケーションの操作。
HARTプロトコルとは?
HART プロトコルの HART という用語は、「Highway Addressable Remote Transducer」の略で、スマート デバイスとデバイスの間のアナログ配線でデジタル データを送受信するために世界中で使用されているオープン スタンダード プロトコルです。 制御システム .このプロトコルは非常に人気があり、世界中の 3,000 万台を超えるデバイスが HART プロトコルを使用しています。このプロトコルは、ホスト システムと業界のスマート フィールド デバイス間の通信を確立するために使用されます。
HART プロトコルは、古い 4 ~ 20 mA ベースのアナログ プロトコルをサポートできると同時に、デジタル スマート計測器の主な利点を備えているため、人気が高まっています。
このプロトコルでは、物理的な接続テクノロジと、さまざまなアプリケーションで使用されるコマンドについて説明します。 Hart コマンドには、Universal、Common Practice、Device Specific の 3 つのタイプがあります。
ユニバーサル タイプのコマンドは、すべての HART デバイスに実装されています。これらのコマンドは、主にコントローラがフィールド デバイスを識別し、プロセス データを読み取るために使用されます。
“製品の合計計算機ブール ”
Common Practice タイプのコマンドは、フィールド デバイスのみに通常適用されるさまざまな機能を説明するために使用されます。これらのデバイスには、範囲の変更、工学単位の選択、セルフテストの実行のためのコマンドが含まれています。
デバイス固有のタイプのコマンドは、すべてのデバイスで同じではありません。これらのコマンドは、独自の構成および変更機能を実行します。そのため、さまざまなメーカーのデバイスが同様の機能を外部に実装している場合に注意することは非常に重要です。たとえば、差圧測定には、完全に異なるハードウェアと、異なるデバイス固有のコマンド セットが含まれる場合があります。
HART プロトコル アーキテクチャ
HART プロトコルは、以下で説明するポイント ツー ポイントとマルチポイントのような 2 つのネットワーク構成で動作します。
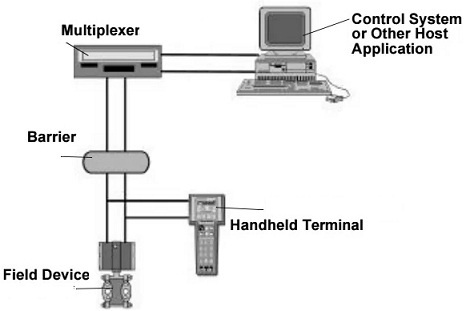
ポイント ツー ポイント ネットワーク構成
ポイントツーポイント ネットワーク構成では、単一のプロセス変数を通信するために固定の 4 ~ 20 mA 信号が使用されますが、追加のプロセス変数と設計パラメータは HART プロトコルでデジタル送信されます。そのため、4 ~ 20 mA のアナログ信号は HART 信号によって変更されず、通常の方法で利用できます。 HART通信デジタル信号は、二次変数へのエントリ権を提供し、その他のデータはメンテナンス、試運転、操作、および診断の目的で利用できます。
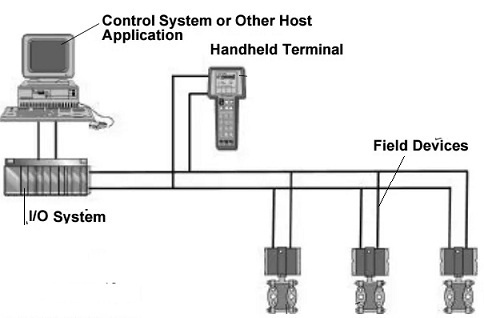
マルチドロップ ネットワーク構成
このネットワーク構成により、さまざまなデバイスを 1 対のワイヤで接続できます。この構成内の通信は完全にデジタルです。これは、アナログ ループ電流全体の通信が無効になっているためです。これは、すべてのデバイス全体の電流が、通常 4mA のデバイスの動作に十分な最小値に固定されているためです。
HART通信はどのように機能しますか?
HART 通信プロトコルは、Bell 202 FSK (Frequency Shift Keying) 標準を使用して、1,200 Hz と 2,200 Hz のような 2 つの異なる周波数で表されるデジタル信号を重ね合わせます。ここで、1,200 Hz の周波数はビット 1 を表し、2,200 Hz の周波数は対応するビット 0 を表します。
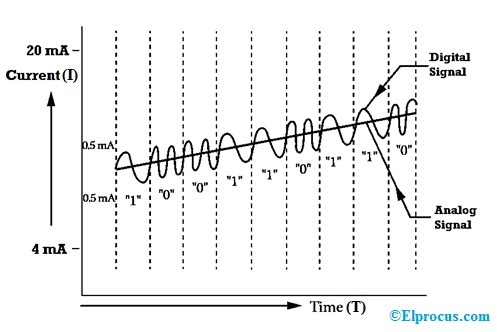
これらの周波数の正弦波が DC アナログ信号ケーブル上に配置されると、データ転送が発生します。したがって、このデータ転送中、周波数シフト キーイング信号の標準値がゼロに等しいため、4 ~ 20 mA 信号は影響を受けません。このプロトコルは、4 ~ 20 mA のアナログ信号とデジタル信号など、一度に 2 つの通信チャネルをサポートします。
アナログ信号は、主要な測定値を 4 ~ 20mA 電流ループと通信しますが、追加のデバイス データは、アナログ信号にオーバーレイされるデジタル信号を介して通信します。
デジタル信号には、デバイスの状態、診断、計算値などのデバイスの情報が含まれます。したがって、2 つの通信チャネルを組み合わせることで、非常に堅牢で低コストの通信ソリューションが提供され、使用と設定が非常に簡単になります。このプロトコルは、アナログ通信とデジタル通信の両方を組み合わせているため、ハイブリッド プロトコルと呼ばれることがよくあります。
HART 技術はマスター/スレーブ プロトコルとして区別されます。これは、マスター デバイスが接続されるとスレーブ デバイスが機能するためです。ここで、スレーブデバイスはスマートデバイスであり、マスターデバイスはコンピュータです。
HART プロトコルのモード
一般に、HART プロトコル内の通信では、ネットワーク内で使用されるデバイスは PLC または分散制御システムであり、マスターとして選択されますが、他のフィールド デバイスはセンサーやアクチュエータなどのスレーブと見なされます。ただし、ここでは、マスターとスレーブ間の通信は、主にシステムが配置されている通信モードに依存します。 HART プロトコル ネットワークは、マスター/スレーブ モードとバースト モードの 2 つのモードで通信します。
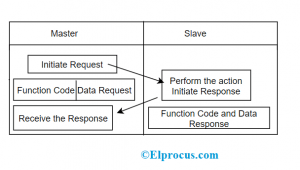
マスター/スレーブモード
このモードは、リクエスト/レスポンス モードとも呼ばれます。このタイプのモードでは、マスター デバイスから要求が発行されると、スレーブ デバイスは単純にデータを送信します。 HART ループごとに、2 つのマスターを接続できます。したがって、プライマリ マスターは通常、DCS (分散制御システム)、PC (パーソナル コンピューター)、または PLC (プログラマブル ロジック コントローラー) であり、セカンダリ マスターは別の PC またはハンドヘルド ターミナルです。スレーブ デバイスは、マスター デバイスからのコマンドに反応するアクチュエータ、コントローラ、およびトランスミッタです。
バーストモード
一部の HART プロトコル対応デバイスは、この通信モードのみをサポートしています。このモードでは、毎秒 3 ~ 4 回のデータ更新など、より高速な通信が可能になります。このモードのマスター デバイスは、スレーブ デバイスに通常の HART 応答メッセージを連続して送信するように指示します。マスターは、スレーブにバーストの停止を命令するまで、高速でメッセージを取得します。このモードは、HART ループから通信するために上記の 1 つの HART デバイスが必要な場合に適用できます。
HART プロトコルと Modbus
HART プロトコルと Modbus の違いには、次のようなものがあります。
|
HART プロトコル |
モッドバス |
| HART はハイブリッド プロトコルです。 | Modbus はデータ通信プロトコルです。 |
| HART は、小規模な自動化から非常に複雑な産業用アプリケーションまで、プロセスおよび計装システムで広く使用されています。 | モッドバス 通常、計装および制御デバイスからデータ収集システムまたはメインコントローラーに信号を送信するために使用されます。 |
| このプロトコルは、ポイント ツー ポイントとマルチドロップのような 2 つの動作モードで動作します。 | Modbus は、ASCII モードまたは RTU モードのような 2 つの伝送モードで動作します。 |
利点
の HART プロトコルの利点 以下のものが含まれます。
- HART プロトコルによって有効化されたデバイスでは、ユーザーは、操作能力を最適化するためにデバイスに最高のデータを使用させることができます。
- 潜在的なトラブルを未然に察知することで、設備の故障によるダウンタイムを減らします。
- デバイスの在庫コストとメンテナンスを削減します。
- 問題認識と問題解決の待ち時間が短縮されます。
- 高度な診断機能を使用することで、安全性の完全性レベルを向上させます。
- HART プロトコルを選択する利点には、主に次のようなものがあります。デジタル機能、アナログ機能、可用性と相互運用性。
- このプロトコルは、さまざまなデバイスやセンサーでも利用できます。
- HART プロトコルベースのデバイスは、業界で広く受け入れられています。
- このプロトコルは、システムの可用性、進行の規則性などを向上させます。
短所
の HART プロトコルの欠点 以下のものが含まれます。
- HART 伝送内のデジタル信号はかなり低速です。
- マルチドロップ配置の場合、アナログ信号にアクセスできません。伝送路を分割できる機器は限られています。
- いつでも 1 つのプロセス変数のみを監視できます。
- このタイプのプロトコルは、Profibus や Foundation Fieldbus などの他のフィールドバス システムと比較して、やや低速です。そのため、この遅い応答時間は、一部の産業ベースのアプリケーションで問題を引き起こします。
- 一般に、HART プロトコルの速度は、プロセス変数が急速に変化しない単純な監視システムには十分です。
アプリケーション
の HART プロトコルのアプリケーション 以下のものが含まれます。
- HART プロトコルは、スマート デバイスと制御システム間のアナログ配線でデジタル データを送受信するために世界中で使用されています。
- これは、産業オートメーションで使用される非常に一般的なプロトコルです。
- このプロトコルは、主にスマート デバイスを分析するためのものです。
- これは、プロセスおよび計装システムで広く利用されています。
- このタイプの通信プロトコルは、体積流量、質量流量、密度、および温度を 1 本のケーブルで制御システムに通信できる場合に、質量流量計を含む多変数計測器に最適です。
- このプロトコルは、主に工業用プロセス制御および測定アプリケーションで使用するように設計されています。
- HART プロトコルは、主にプロセス産業で異なるデバイス間の通信に使用されます。
したがって、これは HART プロトコルの操作 .このプロトコルは、スマート フィールド デバイス間のアナログ ワイヤを介したデジタル データの送受信、および DCS や PLC システムなどのシステムの監視または制御に使用される世界標準です。この双方向通信プロトコルは、ハンドヘルド デバイスから資産管理システムまたはプラント コントローラに至るまで、フィールドとホスト コントローラ間の追加データへのエントリ権を提供するだけです。ここで質問があります: HART プロトコルの完全な形式は何ですか?