電気システムでは、私たちは産業で、 発電所 または国内のニーズ、モーターと発電機は一般的なものになっています。高エネルギー効率で消費電力の少ないシステムが求められているため、これらの電気機器の新しいモデルの発明が見られます。モーターと発電機の信頼性の高い動作のための基本的な計算係数は 力率 。これは、必要な電力に対する適用電力の比率です。通常、産業や工場で消費される総電力は、力率に基づいて計算されます。したがって、力率は常に1に維持する必要があります。しかし、これらのデバイスの無効電力の上昇により、力率は低下します。力率を1に維持するために、多くの方法が導入されています。同期モーターのコンセプトはその1つです。
同期電動機とは?
同期モーターの定義は次のように述べています。 ACモーター 定常状態では、シャフトの回転は印加電流の周波数と同期しています。」同期モーターはACモーターとして機能しますが、ここでは、シャフトの総回転数は、印加電流の周波数の整数倍に等しくなります。

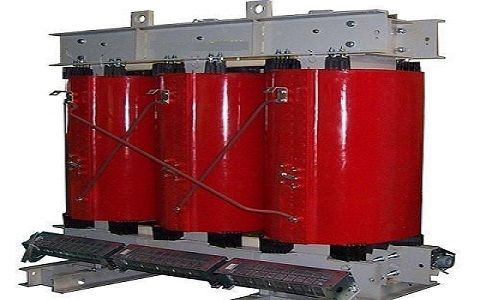
同期モーター
同期モーターは、動作のために誘導電流に依存しません。これらのモーターでは、誘導モーターとは異なり、多相AC電磁石が 状態 r 、回転磁界を生成します。ここで、ローターは永久磁石であり、回転磁界と同期し、それに適用される電流の周波数に同期して回転します。
同期モーターの設計
ステーターとローターは メインコンポーネント 同期モーターの。ここで、ステータフレームには、キーバーと円周リブが取り付けられたラッパープレートがあります。足場、フレームマウントは機械を支えるために使用されます。 DCで界磁巻線を励起するために、スリップリングとブラシが使用されます。
円筒形および円形の回転子は、6極の用途に使用されます。突極ローターは、より多くの極が必要な場合に使用されます。同期モーターと同期オルタネーターの構造は似ています。
同期モーターの動作原理
同期モーターの動作は、固定子の磁場と回転子の磁場との相互作用に依存します。固定子には3相巻線があり、3相電力が供給されます。したがって、固定子巻線は3相の回転磁界を生成します。 DC電源はローターに供給されます。
回転子は、固定子巻線によって生成される回転磁界に入り、同期して回転します。さて、 モーターの速度 供給される電流の周波数に依存します。
同期電動機の速度は、印加電流の周波数によって制御されます。同期モーターの速度は次のように計算できます。
Ns = 60f / P = 120f / p
“ネットワークのノードとは ”
ここで、f = AC電流の周波数(Hz)
p =フェーズごとの極の総数
P =フェーズごとの極の合計ペア数。
破壊負荷よりも大きな負荷がかかると、モーターが非同期になります。三相固定子巻線には、回転方向を決定するという利点があります。単相巻線の場合、回転方向を導き出すことはできず、モーターはどちらの方向にも始動できます。これらの同期モーターの回転方向を制御するには、始動装置が必要です。
同期電動機の始動方法
ローターの慣性モーメントにより、大型の同期モーターの自動始動が停止します。ローターのこの慣性のために、電力が適用された瞬間に、ローターがステーターの磁場と同期することはできません。したがって、ローターを同期させるには、いくつかの追加のメカニズムが必要です。
大きなモーターには、加速に必要な十分なトルクを発生する誘導巻線が含まれています。非常に大きなモーターの場合、無負荷の機械を加速するために、ポニーモーターが使用されます。固定子電流周波数を変えることで、電子運転モーターはゼロ速度からでも加速することができます。
非常に小さいモーターの場合、ローターの慣性モーメントと機械的負荷が小さいことが望ましい場合、始動方法なしで始動できます。
同期電動機の種類
ローターの磁化方法に応じて、同期モーターには2つのタイプがあります–
“スタンガンの作り方 ”
- 興奮していない。
- 直流興奮。
励起されていないモーター
これらのモーターでは、ローターは外部ステーターフィールドによって磁化されます。ローターには一定の磁場が含まれています。ローターにはコバルト鋼などの高保持鋼を使用しています。これらは、永久磁石、リラクタンス、およびヒステリシスモーターとして分類されます。
- 永久磁石同期モーターでは、回転子の設計に永久磁石が鋼とともに使用されます。回転子内に一定の磁界があるため、誘導巻線を使用して始動することはできません。ギアレスエレベータモーターとして使用されています。

- リラクタンスモーターでは、ローターは、突出したポールを備えた鋳鋼で構成されています。トルクリップルを最小限に抑えるために、回転子の極は固定子の極よりも小さくなっています。ローターに始動トルクを提供するためのリスケージ巻線が含まれています。計装アプリケーションで使用されます。
- ヒステリシスモーターは自動始動モーターです。ここで、ローターは、高保磁力の磁気的に硬いコバルト鋼でできた滑らかなシリンダーです。これらのモーターは高価であり、正確な一定速度が必要な場合に使用されます。一般的にサーボモーターとして使用されます。
DC電流励起モーター
ここでは、スリップリングを介して直接供給されるDC電流を使用してローターが励起されます。 AC誘導および整流器も使用されます。これらは通常、1馬力を超えるなどの大きなサイズです。

同期モーターのアプリケーション
通常、 同期モーター 正確で一定の速度が必要なアプリケーションに使用されます。これらのモーターの低電力アプリケーションには、ポジショニングマシンが含まれます。これらはロボットにも適用されます アクチュエータ 。ボールミル、時計、レコードプレーヤーのターンテーブルも同期モーターを利用しています。これらのモーターに加えて、サーボモーターやタイミングマシンとしても使用されます。
これらのモーターは、フラクショナルホースシューサイズの範囲から高出力の工業用サイズの範囲で利用できます。これらのモーターは、高出力の産業用サイズで使用されますが、2つの重要な機能を実行します。 1つはACエネルギーを機械的エネルギーに変換する効率的な手段であり、もう1つは 力率補正 。サーボモーターのどのアプリケーションに出くわしましたか?