IR近接センサーは、物体や人間がセンサーから所定の範囲内にあるときに、反射した赤外線ビームを介して物体または人間の存在を検出するデバイスです。
ここでは、3つの有用な近接センサーの概念について説明します。最初の概念は通常のオペアンプLM358に基づいており、2番目の概念はフェーズロックループ原理で機能するIC LM567を使用しており、検出に対して非常に正確な応答を保証します。 3番目の回路はユビキタスIC555を使用して動作します。ステップバイステップの説明でそれぞれを学びましょう。
概要概要
あります センサーの長いリスト それらは今日市場で入手可能です。
そのようなセンサーの1つが近接センサーです。
この投稿では、近接センサーがどのように機能するか、そしてこのプロジェクトを自宅で行うために必要な知識を提供するものを解明しようとしています。名前が示すように、ユニットはオブジェクトがその近くにあるか遠くにあるかを検出します。それらはさまざまな方法で設計できます。
しかし、最も一般的な方法は 赤外線に基づく およびOPAMP。このデバイスのいくつかの一般的な使用法は、携帯電話、自動水洗システム、自動蛇口、ハンドドライヤー、落下しないロボットで見られます。
必要なコンポーネント
1.1。 IR主導 :すべてのLEDは、電源を入れると何らかの形の電磁放射を放出します。私たちの家庭での経験から、可視光を発するLEDがわかっています。
しかし、赤外線を放射するいくつかの特別なLEDもあります。さまざまな色のLEDが見えるのと同じように、IRLEDもさまざまな波長の光線を放射します。赤外線はさまざまな波長のものであり、その波長帯に属する任意の値をとることができます。
したがって、使用するIRフォトダイオードは、IRLEDによって放出されるINFRAREDの特定の波長を検出できなければならないことが非常に重要です。

二。 IRフォトダイオード :特殊なタイプのダイオードです 赤外線検出用に逆バイアスで接続されています 。 IR放射がない場合、抵抗は非常に高く、電流は実質的にゼロです。
しかし、赤外線が当たると抵抗が減り、放射線の強さに比例した電流が流れます。
フォトダイオードのこの特性は、IR光線の入射時に近接センサーで電気信号を生成するために使用されます。

3.3。 オペアンプ(IC LM358) :オペアンプまたはオペアンプは多目的ICであり、エレクトロニクスの世界で高く評価されています。
このプロジェクトでは、オペアンプがコンパレータとして使用されます。 LM358 ICには2つのオペアンプがあります。つまり、1つのICを使用して2つの近接検出器を作成できます。回路でオペアンプを使用する理由は、アナログ信号をデジタル信号に変換するためです。


四。 プリセット :プリセットは基本的に3端子の抵抗です。
プリセットの機能は、ユーザーがその一部にアクセスできるように、利用可能な合計電圧を分割することです。中央の端子を適切な位置に設定するだけです。
プリセットは、それを超えると出力電圧が生成されるしきい値電圧を設定します。適切なドライバーを使用してヘッドを回転させることにより、手動で任意の値の抵抗に設定できます。

5.5。 赤のLED :プロジェクトに赤いLEDを使用しましたが、一般的には任意の色のLEDを使用できます。これは、障害物が十分に接近したことを示す視覚信号として機能します。

6.6。 抵抗器 :2つの220オームと1つの10kオーム。
7。 電源 :5vから6v。
それがどのように働きますか
近接センサーの動作の背後にある原理はかなり単純です。典型的なコンセプトには、互いに平行な2つのLED(IR発光LEDとフォトダイオード)があります。
それらは送信機と受信機のペアとして機能します。障害物がエミッター光線の前に来ると、それらは反射されてレシーバーによって遮断されます。
フォトダイオードの特性により、遮断された赤外線がフォトダイオードの抵抗を減少させ、結果として生じる電気信号が生成されます。この信号は実際には、オペアンプの非反転端に直接供給される10k抵抗の両端の電圧です。

オペアンプの機能は、与えられた2つの入力を比較することです。
フォトダイオードからの信号は非反転ピン(ピン3)に与えられ、ポテンショメータからのしきい値電圧は反転ピン(ピン2)に与えられます。非反転ピンの電圧が反転ピンのオペアンプ出力はハイです。それ以外の場合、出力はローです。
全体として、オペアンプはこの回路でアナログ信号をデジタル信号に変換します。
出力:
センサー出力は、ANALOGとDIGITALの2つの形式で使用できます。
デジタル出力は、高または低のいずれかの形式です。近接センサーのデジタル出力信号を使用して、障害物回避ロボットの動きを停止できます。障害物が十分に近づくとすぐに、信号をモータードライバーの入力ピンに直接供給して、モーターを停止することができます。
アナログ出力は、ゼロからある有限値までの連続した値の範囲です。このような信号をモータードライバーやその他のスイッチングデバイスに直接与えることはできません。まず、マイクロコントローラーで処理し、ADCといくつかのコーディングによってデジタル形式に変換する必要があります。この出力フォームには追加のマイクロコントローラーが必要ですが、オペアンプを使用する必要がありません。
フルサーキットディガラム

からの更新 管理者
上記の回路設計は、以下に示すように、通常のシングルオペアンプIC741を使用して構築することもできます。

ビデオクリップ
2)正確な近接検出回路(日光に耐性)
次の投稿では、信頼性が高く確実な動作を保証するためにIC LM567を組み込んだ正確な赤外線(IR)ベースの近接検出回路について説明します。この回路は、太陽光やその他の周囲光の影響を受けず、調整された反射信号がセンサーによって受信されるまで影響を受けません。この設計は、障害物検出器としても機能します。
回路コンセプト
正確で信頼性が高く、しかも安価な近接センサー回路を探しているときに、このデザインをネットで見つけました。
この回路は、次の説明の助けを借りて理解することができます。
以下に示す赤外線(IR)モーションディテクタ回路を参照すると、2つのメインステージで構成される設計がわかります。1つはIC LM567を含み、もう1つはIC555を含みます。
基本的に IC LM567 IR周波数の生成/送信とそれを検出する機能のみを実行する回路の心臓部になります。
さらに、ICには内部フェーズロックループ回路があり、周波数検出回路アプリケーションでの信頼性が高くなっています。
これは、特定の周波数を読み取ってラッチすると、その検出機能がその周波数にロックされるため、どんなに強力であっても、その機能に影響を与えたり、ガタガタさせたりすることはありません。
回路動作
R3、C2によって決定される内部発振器周波数は、T1、R2で構成される電流制御ステージを介してIRダイオードD274に給電します。この周波数がチップの中心周波数を決定します。
上記の条件では、ICは上記の周波数に設定されて中心に置かれ、出力ピン#8で一定のハイを生成します。
ICの入力ピン#3は、ICの上記の「中心」周波数と正確に等しい周波数を受信するのを待ちます。
ICのピン#3に接続されたIRレシーバーまたはセンサーは、この目的のために正確に配置されます。
LD274からのIRビームが障害物を見つけるとすぐに、そのビームは反射され、適切に配置された検出ダイオードBP104に当たります。
LD274からのIR周波数はICの入力ピン#3に渡されます。これは、この周波数がICの設定された中心周波数とまったく同じになるため、ICはこれを認識し、出力を即座にHighからLOWに切り替えます。
単安定として構成されているIC555のピン#2の上記のロートリガーは、出力をハイに切り替え、接続されたアラームを鳴らします。
上記の状態は、IRセンサー/検出器からの遮断が続き、ビームが反射されるまで続きます。 R9とC5を含めることで、IC555の出力は、動きや障害物が離れた後でも、接続されたブザーに対して特定の遅延オフ状態を示します。
遅延効果を調整するために、R9とC5を好みに応じて微調整することができます。
上記で説明した回路は、近接検出回路および障害物検出回路としても使用できる。
回路図

テスト回路
次のテスト回路は、基本的なLM567IRベースの設計の結果を検証する方法を示しています。回路図を以下に示します。

ご覧のとおり、基本的なテスト手順を簡素化するために、LM567ステージのみが設計に組み込まれ、IC555ステージは削除されています。
ここでは、ICのピン#8の赤いLEDが点灯し、IR LEDが1フィートの距離内で互いに平行に保持されている限り、点灯したままになります。
Tx赤外線赤色送信機LEDを周波数の異なる他の外部ソースと交換しようとすると、LM567は信号の検出を停止し、赤色LEDの点灯が停止します。
フォトダイオードは重要ではありません。送信機と受信機のLEDに同様のまたは標準のフォトダイオードを使用できます。
上記のテストセットアップのビデオクリップ:
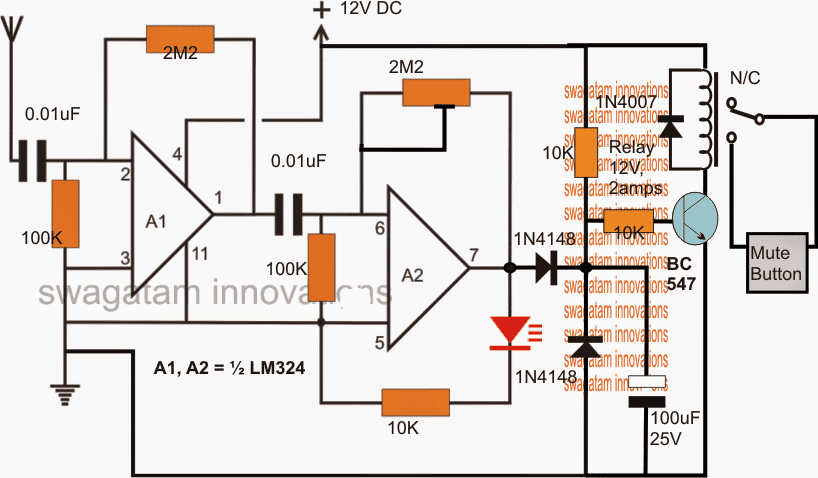
3)別のIC567ベースの近接センサー設計
上記と同様に、この回路に関する例外的な機能は、直接IR放射によってアクティブ化またはガタガタ音を立てることができず、検出器に当たる反射IR放射のみが回路をトリガーすることです。


回路の中央には、ツイン機能を実行する単独の567トーンデコーダIC(U1)があります。これは、基本的なIR送信機ドライバーと受信機の両方として実行されます。コンデンサC1と抵抗R2を使用して、U1の内部発振器周波数を約1kHzに固定します。
ピン5のU1からの方形波出力はQ1ベースに適用されます。トランジスタQ1は、LED2アノードに20mAのパルスを接続するエミッタフォロワ増幅器として設定されています。
トランジスタQ3はLED2からのIR出力をピックアップし、さらに増幅するために送信をQ2に向けます。 Q2による増幅に続いて、信号はピン3でU1の入力に戻され、ピン8がローになり、LED1がオンになります。
必要に応じて、LED1をオプトカプラーに置き換えて、事実上すべてのAC作動負荷を切り替えることができます。回路は非常に単純なので、ほとんどすべての設計計画が機能します。
IRエミッター(LED1)とフォトトランジスター(03)は、横に並べて配置し、まったく同じトラックに焦点を合わせて、約1インチ離して設置する必要があります。
検出器とエミッターの間に割り当てられた範囲の最適な位置を把握するために、一対のIRデバイスの間隔と設置の視点をテストする必要がある場合があります。
経験則として、IRエミッター/検出器のペア間の1インチのギャップにより、近接回路が約0.5〜1インチ離れたターゲットを検出することが可能になります。明るい影のターゲットは、より深い要素から作成されたターゲットよりもはるかによく反射し、より長い距離で実行できます。近接センサーが調整されたIR信号を検出する限り、制御回路はオンになり続け、信号が消えるとすぐに出力がオフになります。
4)IC555回路を使用した近接検出器
この3番目の設計では、離れた場所からの人間の侵入を検出するために使用できる、単純なIC555ベースの近接検出回路について説明します。
“実験におけるエラーの種類 ”
回路動作
赤外線近接検出器は、電子オートメーションアプリケーションの範囲で最も価値があり広く使用されている回路の1つと見なすことができます。
通常、自動ウォーターディスペンサー、自動ハンドドライヤーユニットで使用されており、デパートの自動ドアでいくつかの特定のバリエーションが見られる場合があります。
IC555を使用した提案された近接検出回路の動作原理
設計では、IC LM555からのピーク電圧パルスの急速なバーストの生成が比較的低い周波数レートで実装され、IRビームのジェットとして赤外線LEDを介して送信されます。
これらの送信パルスは、監視が必要な領域に向けて集束され、これらの反射信号を受信するために戦略的に配置されたフォトトランジスタダイオード上で対象または侵入者が検出されると反射されます。
これが発生すると、接続されたリレーメカニズムを有効にし、続いてアラームデバイスをアクティブにするために、受信信号が処理されます。
上記の実装をテストするために、オブジェクトをIRビームのゾーン全体に導入し、約1メートルの距離内で焦点を合わせた領域で手を動かすなどしてリレー動作を監視することで応答を確認できます。
反射信号がフォトトランジスタに当たると、1Mポット(調整可能)全体で電位差が発生し、関連するダーリントンステージがトリガーされ、単安定回路として構成された右側の555ステージがアクティブになります。
リレーはこれに応答してアクティブになり、1Mと10uFのコンデンサによって設定された単安定の所定の時間遅延に応じてオンのままになります。
回路図

提案されたIC555ベースのIR近接検出回路の部品リスト。
2-- IC LM 555
2--ICソケット8ピン
1--リレー12V5ピン
1--赤外線フォトトランジスタ汎用

1--赤外線ダイオード汎用
3-- BC547
2--コンデンサ。 10 uF / 50 V
1--1N4148ダイオード
1--赤のLED5mm
1-- 68 H
1-- 1K5
2〜10K
1〜100K
1-- 470 RHすべて1 / 2W
1-- 10k 1 / 4w抵抗器を1MプリセットセンターリードとBC547ペアの間に接続します
IC555ピン配列

前:Arduinoを使用してこのバックコンバーターを作成する 次へ:自動ドライランシャットオフを備えたSMSベースのポンプコントローラー