ハリーウォードは、DCモーター速度を制御するために1891年にワードレナード制御システム法を導入しました。この方法は基本です アーマチュア 制御方法。電圧制御方式には、複数電圧制御方式と区レナード制御方式または電機子電圧制御の2種類があります。この記事では、Ward Leonard ControlSystemメソッドを使用して電圧を調整することによって速度制御を実現する方法について説明します。
ワードレナードメソッドとは何ですか?
定義: 速度制御または電機子電圧制御のワードレナード方式は、基本的に、高感度の速度が制御されている場所で使用されます。エレベータ、抄紙機、電気ショベル、ディーゼル機関車、クレーン、炭鉱ワインダーなどに使用されています。
ワードレナード法
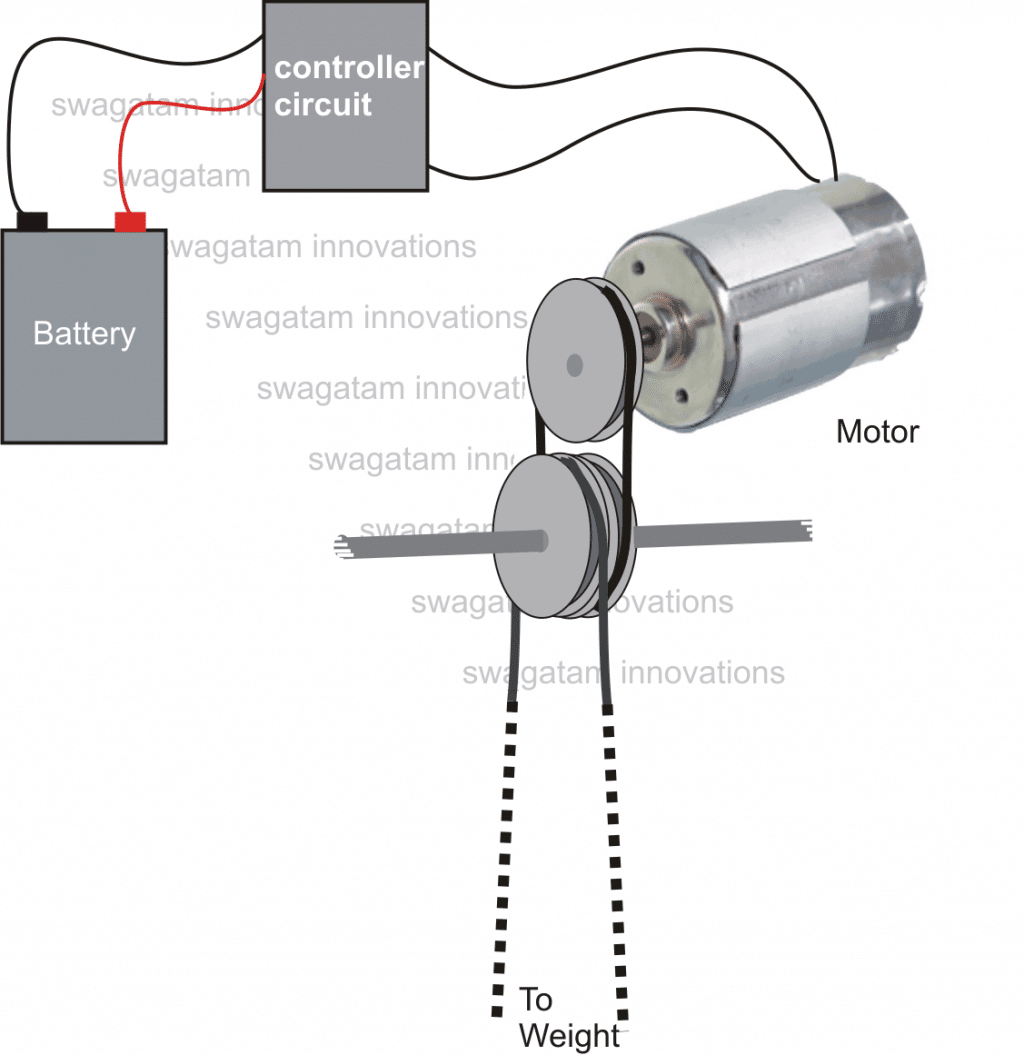
速度制御システムのワードレナードメソッドは、メインモーター(M1)で構成されています。 DC発電機 (G)、および制御されたDCモーター(M2)。電源は、DCマシンの電機子端子とシャントフィールドポイントに供給されます。メインモーターはDC発電機に直接結合されているため、電力は制御されたDCモーターに直接供給されます。 DC発電機への電圧を制御するために、フィールドレギュレータが使用されるため、値をゼロから最大に調整することにより、DC電圧は安定点で調整されます。調整されたDC電圧は、制御されたDCモーターに供給されています。
DCモーターの動作を逆にしたい場合は、DC発電機の界磁電流を逆にするだけです。この場合、直流発電機の界磁電流を逆にすると、モーターの回転が自動的に逆になります。逆方向はスイッチRSを使用して実現されており、RSは逆スイッチに他なりません。速度制御図のワードレナード法を以下に示します。

ワードレナード制御システム
Ward Leonard Controlシステムは、電機子電圧制御とフィールド制御の2つの制御戦略と組み合わされています。電機子電圧制御は、DC発電機のフィールドを変更することによって実現されています。下図に示すこのシステムのトルクと出力の特性。

ワードレナード制御システム波形のトルクと電力特性
Ward Leonard制御システムは、一定の馬力と一定のトルクの2つの一定値を提供します。 X軸は、0から100%と100%を超える2つの部分に分割される速度です。 0〜100%の速度は基本速度と呼ばれ、100%以降は上記の基本速度と呼ばれます。同様に、制御戦略は0から100%までの2つの部分に分けられ、電機子電圧制御として示され、ベース速度を超えるとフィールド制御として示されます。
ケース1-トルク対速度
速度が0から100%に増加すると、トルクは一定に維持され、速度を100から基本速度より上に移動すると、電機子電圧制御でトルクが直線的に減少します。制御されたフィールドを変更すると DCモーター、 トルク値は、フィールド制御で直線的に減少します。
ケース2-馬力対速度
0〜100%では、基本速度の値を上げると馬力が直線的に増加し、基本速度の後、機械の速度を上げると馬力は一定に保たれます。
アプリケーション
電機子電圧制御のアプリケーションのいくつかは次のとおりです。
- 鉱山用ホイスト
- エレベーター
- 鋼圧延機
- 抄紙機
- ディーゼル機関車
- クレーン
利点
電機子電圧制御の利点は次のとおりです。
- 始動レオスタットが使用されていないため、電力の浪費が少なくなります
- 広範囲で正確な双方向の速度が簡単に得られます
- 速度調整は良いです
短所
電機子電圧制御の欠点は次のとおりです。
- 広い小麦粉面積が必要です
- 高価な基盤
- 効率が低い
- 損失が大きい
- サイズと重量が大きい
- それはより多くのノイズを生成します
したがって、これはすべてについてです ワードレナードメソッドの概要 速度制御の概要、長所、速度制御図、長所、短所、およびアプリケーションについて説明します。ワードレナード制御システムの特徴は何ですか?