DCモーターをマイクロコントローラーに接続することは、多くの産業およびロボットアプリケーションで非常に重要な概念です。 DCモーターをマイクロコントローラーに接続することで、モーターの方向を制御したり、モーターの速度を制御したりできます。この記事では、 8051マイクロコントローラーを使用したDCモーターの速度制御 ブルートゥースAndroidコントローラーの助けを借りて。ブロック図を以下に示します。

AndroidアプリケーションによるDCモーターの速度制御のブロック図
AndroidアプリケーションによるDCモーターの速度制御
Androidモバイルを使用したDCモーターの速度制御 産業用アプリケーション、エスカレーター、エレベーター、ロボットアプリケーション、セキュリティシステムアプリケーションなどの多くのアプリケーションがあります。ユーザーは自分のAndroidスマートフォンにAndroidアプリケーションをインストールする必要があります。
ユーザーは、DCモーターの速度を制御するための指示を送信できます。 Bluetoothワイヤレス通信は、ユーザーとコントローラーにコマンドを送信するために使用されます。回路の主なハードウェアコンポーネントは、8051マイクロコントローラー、モータードライバーL293D IC、DCモーター、Bluetoothモジュール、およびAndroidスマートフォンです。
詳細については、このリンクを参照してください 8051マイクロコントローラーの歴史と基本
マイクロコントローラピンの最大出力電流は5Vで15mAですが、DCモーターは機能せず、モーターによって生成される逆起電力(起電力)でさえマイクロコントローラーに害を及ぼす可能性があります。
したがって、DCモーターをマイクロコントローラーに直接接続することは価値がありません。そのため、モータードライバー回路(L293D IC)は インターフェースDCモーターとマイクロコントローラー 。
モータードライバー(L293D)
L293Dは、デュアルHブリッジモータードライバー集積回路(IC)です。モータードライバーは、低電流の制御信号を受け取り、高電流の信号を提供するため、電流増幅器として機能します。この高電流信号は、モーターを駆動するために使用されます。 L293Dには、2つのHブリッジドライバ回路が組み込まれています。 。その共通の動作モードでは、2つのDCモーターを順方向と逆方向の両方で同時に駆動できます。 2つのモーターのモーター動作は、ピン2と7および10と15の入力ロジックによって制御できます。
入力ロジック00または11は、対応するモーターを停止します。 Logic 01と10は、それぞれ時計回りと反時計回りに回転します。モーターが動作を開始するには、イネーブルピン1と9(2つのモーターに対応)を高くする必要があります。イネーブル入力がハイの場合、関連するドライバがイネーブルになります。
その結果、出力がアクティブになり、入力と同相で動作します。同様に、イネーブル入力がローの場合、そのドライバはディセーブルになり、それらの出力はオフでハイインピーダンス状態になります。 L293DICのピン配列と内部構造を以下に示します。

L293DICのピン配列と内部構造
Androidとは何ですか?
ザ・ Androidオペレーティングシステム Linuxをベースに動作し、主にスマートフォンやタブレットコンピューターなどのタッチスクリーンモバイルデバイス向けに設計されています。最近最も広く使用されているモバイルOSの1つはAndroidです。アンドロイドは2003年にカリフォルニアのパロアルトで設立されたソフトウェアです。

Androidモバイル
Androidは強力なオペレーティングシステムであり、スマートフォンで多数のアプリケーションをサポートしています。これらのアプリケーションは、ユーザーにとってより快適で高度なものです。 Androidソフトウェアをサポートするハードウェアはに基づいています ARMアーキテクチャプラットフォーム 。
androidはオープンソースのオペレーティングシステムであるため、無料で誰でも使用できます。アンドロイドはあなたが何らかの方法であなたの人生を管理するのを助けることができる何百万ものアプリを利用できます、そしてそれはAndroidが非常に人気がある理由で市場で低コストで利用可能です。
DCモーターの速度制御の概略図説明
DCモータ速度制御回路の概略図と動作説明を以下に示します。

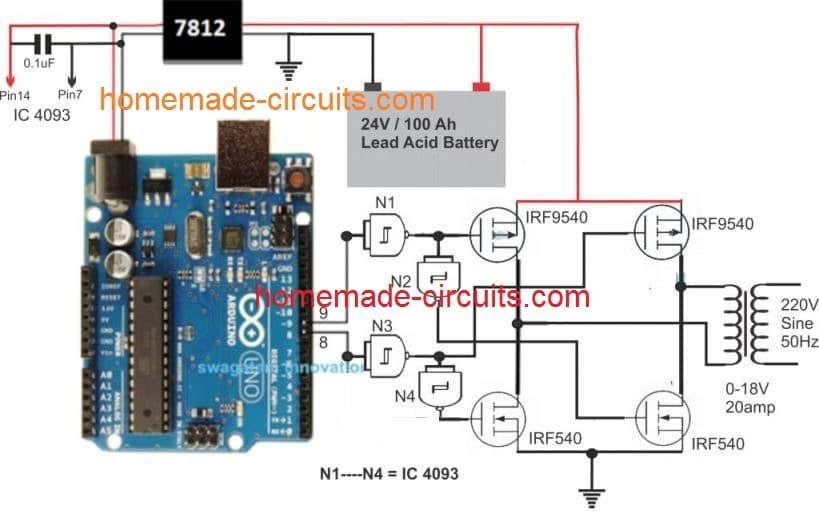
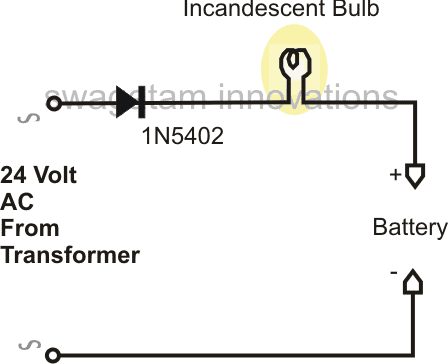
回路図
この回路は、230Vから12Vまでの降圧トランスと4つのダイオードで構成される標準電源を使用して、脈流DCを供給するブリッジ整流器を形成します。 電解コンデンサ 約470µFから1000µFです。
フィルタリングされたDCは調整されておらず、ICLM7805を使用してピン番号3で5VDCを一定にします。調整された5VDCは、回路によって生成されたノイズに対して10µFの小さな電解コンデンサによってさらにフィルタリングされます。
Androidデバイスからの制御信号はBluetooth経由で送信されます。この信号は、両方のデバイスの送信機と受信機の助けを借りてマイクロコントローラーと通信されます。この信号は、モーターの速度と方向を制御する1文字で示されます。
DCモーターの速度を制御する方法は?このプロジェクトでは、主な動作原理は、プログラムされたマイクロコントローラーからPWMパルスが生成され、L293Dのピン1がパルスのデューティサイクルを増減できるようにすることです。これらのデューティパルスは、DCモーターを特定の速度で適切な方向に駆動することにつながる可能性があります。
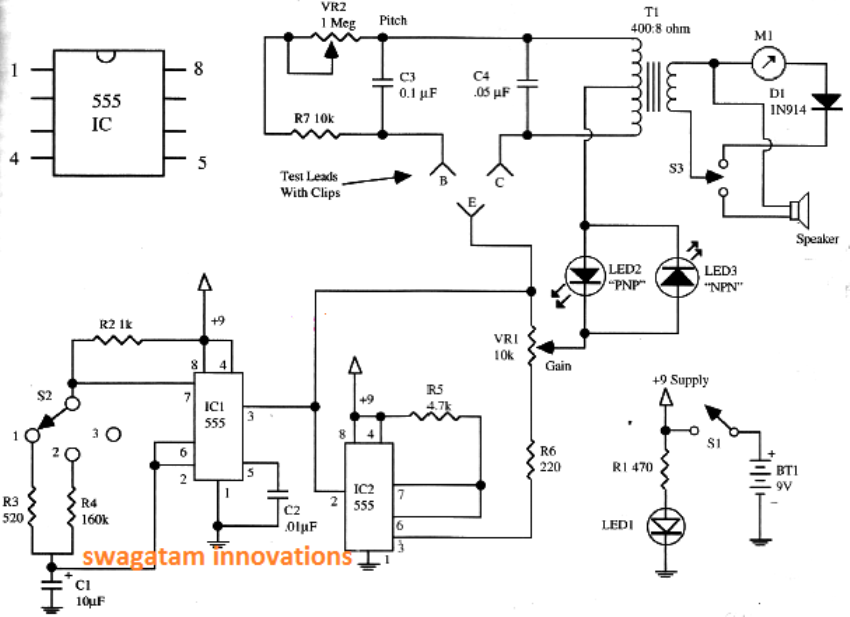
パルス幅変調
パルス幅変調 これは、接続されたBluetoothデバイスによって受信されたデータを取得するように適切にプログラムされたマイクロコントローラーの出力から実現されます。プログラムがPWMパルスを開発するために実行されている間、1つのBluetoothモジュールが双方向データフローのためにマイクロコントローラーに適切に接続されます。
スマートフォンのAndroidアプリケーションは、電話の内蔵Bluetoothを介して、必要に応じて操作するためにマイクロコントローラーに接続されているBluetoothモジュールと通信します。パルス幅変調のデューティサイクルを以下に示します。
“単三電池の内部抵抗 ”

PWMデューティサイクル
Androidプログラムを実行しているスマートフォンのアップタッチボタンは、PWMのオンタイムデューティサイクルを増やすために使用され、ダウンタッチボタンは、デューティサイクルを減らすために使用されます。

DCモーター速度制御用のAndroidアプリケーション
ザ・ DCモーター さまざまなデューティサイクルが適用されたL293DモータードライバーICを介して実行され、速度制御のためにマイクロコントローラーからL293Dのピン1に給電できるようにします。マイクロコントローラーに接続されたLCDデータピンは、モーターが動作している速度のパーセンテージを表示します。
したがって、Androidアプリケーションを使用したDCモーターの速度制御は、費用効果が高く、実用的で、電力を節約するための最も安全な方法です。単純なPWM(パルス幅変調)技術を使用してモーターの速度を制御できます。波のデューティサイクルがモーターの速度を制御します。出力ポートを交換することにより、モーターの方向を効果的に変更します。
さらに、この記事に関する質問がある場合は、以下のコメントセクションにコメントして、貴重な提案をしてください。ここにあなたへの質問があります、マイクロコントローラーへのDCモーターインターフェースのアプリケーションは何ですか?