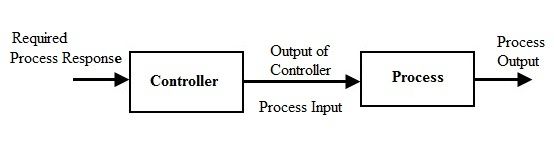
投稿では、ラインレーザーレベル装置から生成された精密な水平レーザーラインに応答して動作し、接続されたツールまたは作業作業の位置合わせを非常に完璧かつ正確に自動的に調整する、単純なラインレーザー制御モータードライバー回路について説明します。
ラインレーザーとは
ラインレーザー装置は、大工時代の古い水準器の高精度電子代替品です。
ラインレーザーデバイスは、実際には360を生成できる高度なレーザー放射装置です。 °° 高精度の照光式水平レーザーライン。すべての産業または建設エンジニアリングジョブへのキャリブレーションリファレンスを提供するため、ジョブの最終結果は完全に真っ直ぐで、わずかなエラーもなく整列します。
この回路は、このブログの熱心な読者の1人であるRafal氏から要求されました。
ラインレーザー制御モーターの作業手順に関する詳細な説明は、次の段落から学ぶことができます。
設計目標
氏。 ラファル:私はこれにとても慣れていません。過去数週間にいくつかの調査を行いましたが、必要なものが正確に見つかりませんでした。
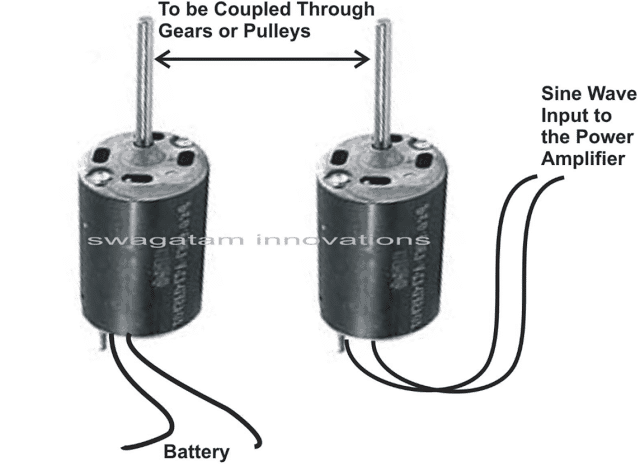
私はどんな助けにも感謝します。自分のアイデアの写真を添付します。 2つの12VDCモーターをレーザーレベルで制御したいと思います。
ラインレーザーレベルは受信機に信号を送ります。

この信号は、12 VDCモーターの方向を制御する必要があります。モーターがねじ棒を前後に回転させ、工具の高さを調整します。
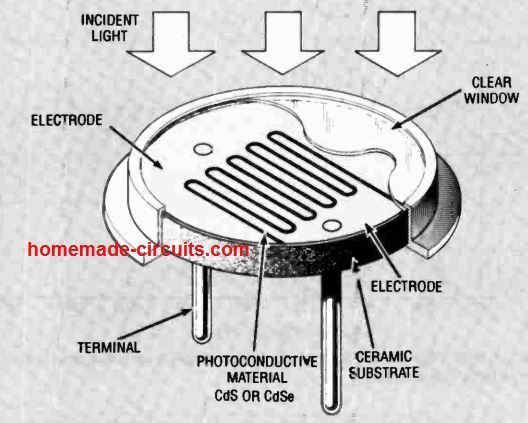
私が発見したことから、並列に接続された複数のフォトダイオードがあり、1つはゼロレベルより上のレーザーを検出し、もう1つはそのレベルより下のレーザーを検出します。ヌルレベルは、システムがウェイクアップしないようにするための、フォトダイオード間のある種の一時停止です。ディスプレイなしのレーザーセンサー。絵の写真だけをあげました。
Hブリッジ回路が必要ですが、私が見つけたものはすべてArduinoシステムで使用することです。必要に応じて、既製の橋を最大30ドルのリーズナブルな価格で購入できます。
理想的には、これは赤と緑の両方のレーザーで機能しますが、波長が非常に異なるため、それが可能であるとは思えず、光スペクトル全体で機能しません。
最初に、上下ボタンでエンジンに取り付けられたこのビームのレベルを設定したいと思います。 2番目のモーターがセットアップ中にジャイロスコープで水平になると嬉しいですが、Arduinoがないと非常に難しいかもしれません。
私がやろうとしていることはとても単純なので、Arduinoを使わなくても逃げることができると感じています。そして、私は建設現場の困難な状況のためにアナログを主張し、電子機器が多ければ多いほど、デバイスの信頼性が低くなるように思われます。
屋内でのみ動作し、レーザー距離は最大10mです。私が最初に見つけたモーターは、最大200mAの大きな消費電流2.19 Aを持っていますが、トルクも大きいです。
マキタのバッテリーから18VDCに電力を供給します。
提案を事前に感謝します。
ポーランドからのご挨拶
ラファール
みやげ品 :モーターシャフトの動作に混乱があります。両方のモーターのネジ山がツールを押しますが、引き戻すことはできませんか?それはどのように機能しますか?
単一のモーターで同じことを実装することは可能ですか?
氏。ラファール: より低いレベリング直定規は、小さな部屋の場合のみ、おそらく70cmになります。ドアから入ることができるトイレ。
ドライブなしの機械、手で引っ張る、直定規のみを水平にします。ビデオでは、マスト上の2つの黄色のオブジェクトは、直定規にしっかりと取り付けられたレーザー検出器です。
レーザーはどこか遠くに立っていて、水平線を生成します。
モーターはカートに取り付けられ、ネジ山はレーザー検出器で直定規を水平にするために取り付けられます。両側を水平にするために2つのモーターが必要ですが、それは鏡像です。
唯一の一般的な部分は、既製のモジュールとおそらくジャイロスコープからそれを行っているかのように、2チャンネルのHブリッジですが、それは夢です:)。
左右のモーターを回転させるためのボタンがあることが重要です。
手順はこちらです。たとえば、指定された床面から2m上にレーザーを吊るします。レーザービームから直定規の下端まで2メートルを測定します。
直定規の下端から2メートルになるように、スイッチの左右のボタンを押す高さを調整します。レーザービームがフォトダイオードセクション間でゼロレベルになるように、マストに検出器を配置しました。そして残りはそれ自身をします
添付ファイルには、検出器の動作図を入れました。
ラファール
回路設計

上の図を見ると、レーザーラインの真直度の精度に関して、関連するモーター制御ツールを検出および修正するために、このような2つの同一の回路ステージが必要になります。
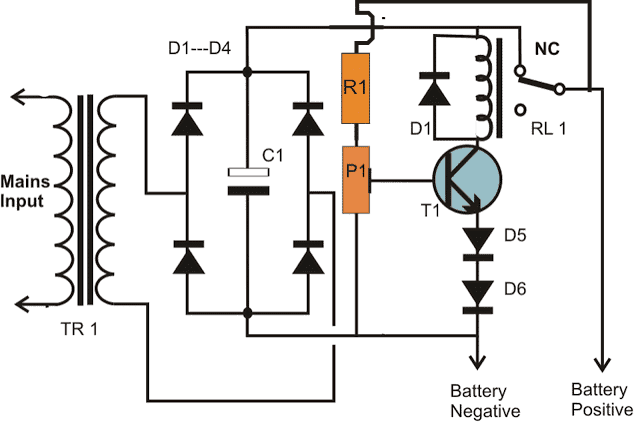
以下に示すように、2つの同一のステージは相互の鏡像です。

回路はかなり単純です。これはウィンドウコンパレータと連動し、LDRのペアが同じレーザーラインの明るさで露光されている限り、駆動モーターが動作しないことを保証します。
次に、A1の非反転入力とA2の反転入力に半分の電源電圧が生成されます。
レーザーラインのたわみが検出されるとすぐに(モーター制御ツールが真っ直ぐに位置合わせされていない場合に発生する可能性があります)、LDRR1およびR2に影響を与える明るさが変化します。
この状況では、ウィンドウコンパレータへの入力電圧が電源電圧の半分から離れてドリフトします。この状況により、コンパレータ出力はモーターブリッジネットワークにモーターを時計回りまたは反時計回りの方向に動かすように命令します。
トランジスタT1。 。 。 T4は、ブリッジネットワークのように構成されており、モーターの切り替えを可能にします。 順方向と逆方向 LDR照明またはレーザーラインの偏角によって異なります。
ダイオードD1。 。 。 D4は、モーターが作動して動作している間に生成される電圧ピークをキャンセルするように配置されています。プリセットポテンショメータP1およびP2の機能は、位置合わせの調整を容易にするためのものです。
これらは、関連するLDRペアがまったく同じレーザー光の明るさにさらされている限り、モーターが完全に停止して非アクティブになるように微調整されています。
たとえば、モーター制御ツールの位置合わせが正しくないために、レーザーラインの傾きにより、LDRR1よりもLDRR2の光が減少するとします。これにより、ポイントAの電圧が供給電圧の半分を超えて上昇します。
この状況では、A1オペアンプの出力が高くなり、トランジスタT1とT4が強制的に動作します。これにより、モーターが適切な方向に回転します。このアクションにより、接続されたツールが、水平方向の位置合わせの精度がレーザーラインの精度と一致するまで、自動的に直線にシフトします。
逆に、LDRの照明が上記と反対になるようにツールを反対方向に傾けると仮定すると、ポイントAの電圧が供給電圧の半分を下回ります。この状態により、出力A2オペアンプがハイになり、T3とT2が動作可能になります。
これにより、モーターが反対方向に回転し、レーザーラインの水平精度と完全に一致するようになるまで、関連する方向のツールの位置合わせを修正しようとします。
上/下ボタン
水準器の高さを最初に事前設定するための上下ボタンは、各LDRと並列に押しボタンスイッチを配線することで簡単に実装できます。
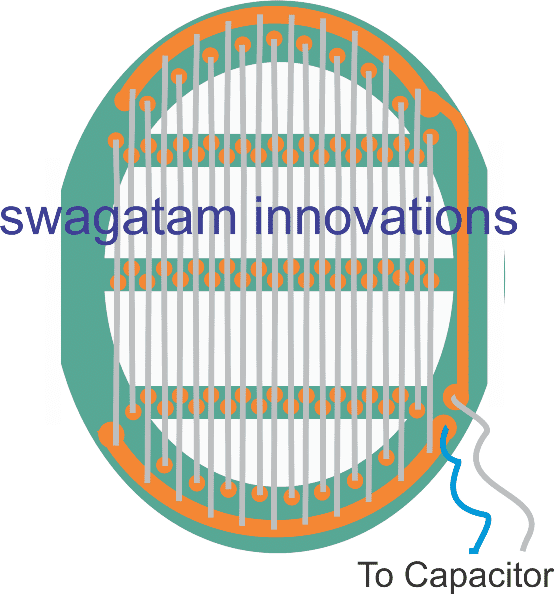
LDRのインストール
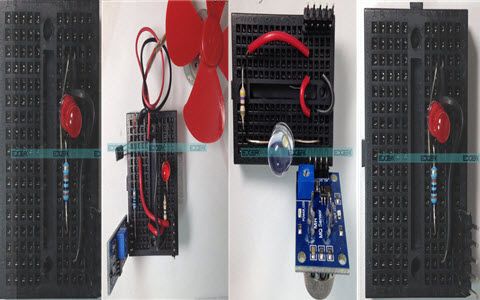
LDRから正しい応答を得るには、左右のペアをエンクロージャーのようなチューブ内に取り付けて、他の周囲光ではなく、レーザー照明のみを「見る」ことができるようにする必要があります。
このアイデアは、次の画像で確認できます。

ここでは、LDRが互いに非常に近くに配置されていることがわかります。これにより、レーザーラインが正確な中心にあるときに、両方のLDRペアの一部がレーザー光によって均一に照射されます。
LDRエンクロージャーの前面は拡散レンズで覆うことができるため、レーザー照明をそれぞれのLDR全体に均一に拡散させることができます。
前:貴重品を保護するためのシンプルな盗難防止警報回路 次へ:ユニバーサルBJT、JFET、MOSFETテスター回路