PIRセンサーとは何ですか?
PIRセンサーは、センサーから約10m以内で動き回る人間を検出します。実際の検出範囲は5m〜12mであるため、これは平均値です。PIRは基本的に赤外線のレベルを検出できるパイロ電気センサーで構成されています。個人がそのエリアを出たり入ったりしたときに発見する必要のある多数の重要なプロジェクトまたはアイテム。 PIRセンサーは驚くべきものであり、フラットな制御と最小限の労力で、レンズ範囲が広く、インターフェースが簡単です。

PIRセンサー
ほとんどのPIRセンサーには、側面または底面に3ピン接続があります。 1つのピンは接地され、別のピンは信号になり、最後のピンは電源になります。通常、電力は最大5Vです。大きなモジュールには直接出力がなく、代わりにリレーを操作するだけの場合があります。その場合、アース、電源、および2つのスイッチの関連付けがあります。 PIRとマイクロコントローラーのインターフェースは非常に簡単でシンプルです。 PIRはデジタル出力として機能するため、ピンがハイまたはローに反転するのをリッスンするだけです。モーションは、単一のI / Oピンでハイ信号をチェックすることで検出できます。センサーがウォームアップすると、モーションが発生するまで出力はローのままになります。モーションが発生すると、出力は数秒間ハイにスイングし、その後ローに戻ります。動きが続くと、センサーの視線が再び見えるまで、出力はこのように循環します。 PIRセンサーには、容量に合わせて特定の最終目標を設定したウォームアップ時間が必要です。これは、自然の領域の研究に含まれる整定時間が原因です。これは、10〜60秒のどこでもかまいません。
この間、センサーの遠近法の分野で合理的に期待できるほどの動きはないはずです。
PIRセンサーに関するビデオ
以下はPIRセンサーのビデオです
PIRセンサーの7つのアプリケーション分野
- すべての屋外照明
- エレベーターロビー
- マルチアパートメントコンプレックス
- 一般的な階段
- 地下室または屋根付き駐車場用
- ショッピングモール
- ガーデンライト用
5つの機能
- PIR、モーション検出を完備。
- 低ノイズ、高感度のデュアルエレメントセンサー。
- 供給電圧–5V。
- 調整可能な遅延時間。
- 標準TTL出力。
PIRセンサーIC
PIRセンサーICは、Vcc、グランド、出力の3つのピンで構成されています。
“携帯電話の妨害機のしくみ ”

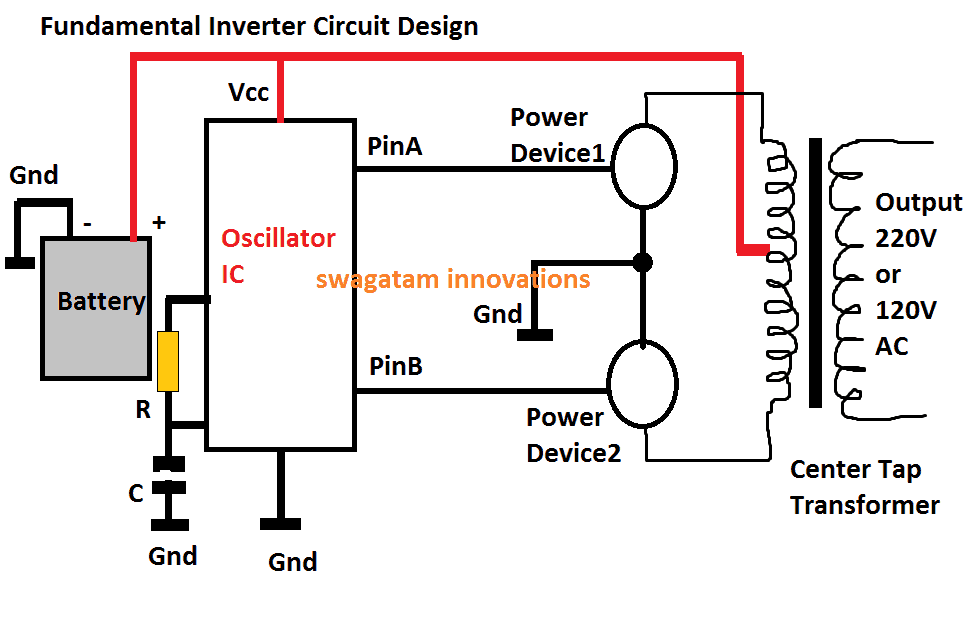
 人間のIR放射線が存在する場合、センサーは放射線を検出し、それを直接電気パルスに変換して、インバーター回路に供給します。インバータ回路はトランジスタで構成されており、高いベース電流を流すと飽和状態になり、最終的には低いコレクタ電圧になります。したがって、トランジスタ出力は低くなります。
人間のIR放射線が存在する場合、センサーは放射線を検出し、それを直接電気パルスに変換して、インバーター回路に供給します。インバータ回路はトランジスタで構成されており、高いベース電流を流すと飽和状態になり、最終的には低いコレクタ電圧になります。したがって、トランジスタ出力は低くなります。
この低インバータ出力はマイクロコントローラに接続されています。マイクロコントローラーが受け取った入力に基づいて、モータードライバーを制御し、モータードライバーがモーターの動きを制御します。
PIRセンサーを使用したモーション検出
PIRまたはパッシブ赤外線センサーを使用して、近くにいる人間の存在を検出できます。出力は、ドアの動きを制御するために使用できます。
基本的に、動き検出は、光センサーを使用して、暖かい物体から放射される赤外線の存在、または物体がデバイスの別の部分から放射されるビームを遮るときの赤外線の不在を検出します。
PIRセンサーは、暖かい物体から放射される赤外線を検出します。これは、(入射赤外線放射による)温度変化を電気信号に導入するパイロ電気センサーで構成されています。赤外光が結晶に当たると電荷が発生します。
したがって、PIRセンサーを使用して、約14メートルの検出領域内の人間の存在を検出できます。
PIRセンサーを使用したアプリケーション–自動ドア開放システム
特にショッピングモール、ホテル、劇場など、訪問者のためにドアを開ける必要がある場所では、ドアの開閉は常に面倒な作業です。

アン 自動ドア開閉システム 人間の存在を感知し、マイクロコントローラーにパルスを送信するprセンサーで構成されます。マイクロコントローラーは、入力ピンとイネーブルピンに適切なパルスを送信することでモータードライバーを制御します。
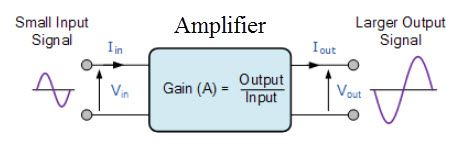
一般に、人体はかなりの距離からPIRセンサーによって感知される赤外線エネルギーを放出します。 PIRセンサー、つまりパッシブ赤外線検出器からの出力はトランジスタBC547に増幅され、その出力はコレクターでマイクロコントローラーのピン1に接続されます。移動するオブジェクトはPIRによって検出されますが、出力でロジックハイを生成し、マイクロコントローラーのピン1でロジックローを生成するために使用されるトランジスタによって反転されます。したがって、マイクロコントローラは、トランジスタを介して適切なプログラミングを介してprセンサーからロジックロー信号を受信し、ピン2にロジックローを送信し、ピン7にロジックハイを送信して、モーターを順方向に動作させ、ドアをシャフトに接続します。モーターが開きます。このプログラムは、上記で説明したようにモータードライバーIC L293Dに適切な入力を提供し、モーターを一方向に回転させてドアが開いた状態を可能にするように作成されています。ドアが完全に開くと、SPDTリーフスイッチからモータードアから割り込み信号が受信され、ドアが端に達するとゼロロジックを配置してモーターを停止し、L293Dのピンでモーターを無効にします。
言い換えると、spdtスイッチからの電流信号はマイクロコントローラに割り込み信号を送信し、ロジックローの出力をモーターicのイネーブルピン入力に送信して、モーターを停止します。数秒後、マイクロコントローラーはモーターがドアの閉鎖を表す反対方向に回転するようにモータードライバーICに逆論理を送信します。これは、マイクロコントローラーがロジックローをピン2に、ロジックハイをピン7に送信し、モーターがその方向を反転させてドアが自動的に閉じられるときに発生します。これは、人がドアの道を渡った数秒後に起こります。したがって、人がドアに近づいたり、ドアから出たりすると、ドアを自動的に開閉できます。
フォトクレジット:
- PIRセンサーIC エンジニアガレージ