
今日、ロボット工学は技術の分野で最も進んだものの1つになりつつあります。ザ・ ロボット工学の応用 主に自動車、医療、建設、防衛に関与し、 消防ロボット 火災事故から人々を助けるために。しかし、リモコンやスイッチでロボットを制御するのは非常に複雑です。そこで、新しいプロジェクト、つまり加速度計ベースのジェスチャ制御ロボットが開発されました。このプロジェクトの主な目標は、加速度計を使用して手のジェスチャーでロボットの動きを制御することです。

加速度計ベースのジェスチャ制御ロボット
加速度計ベースのジェスチャ制御ロボット
このプロジェクトには、送信機セクションと受信機セクションが含まれます。ザ・ 必要なコンポーネント このプロジェクトを構築するには、Ht12e、Ht12d、L293D、AT89S52、7805、コンデンサー、クリスタル、PBTコネクター、単極アンテナ、抵抗器、LED、加速度計、バッテリーがあります。加速度計は、このプロジェクトに不可欠なデバイスです。
加速度計または送信機デバイスは、手のジェスチャーによって異なります。送信機を介してコマンドを受信し、At89S51マイクロコントローラーを使用して処理します。この マイクロコントローラは ロボットに信号を送り、優先方向に移動します。このロボットの基本的な動作原理は、ロボットに取り付けられたマイクロコントローラーにデバイスの読み取り値を送信するデータ信号のセットです。事前にプログラムされたマイクロコントローラーはプログラムに従って動作し、それに応じてロボットを動作させます。
加速度計を用いたジェスチャー制御ロボットは、加速度計を乗せて手の動きで操作できるロボットの一種です。このプロジェクトは、送信機デバイスと受信機デバイスの2つの部分に分かれています。ジェスチャデバイスが送信デバイスとして機能し、ロボットが受信デバイスとして機能する場合送信デバイス(加速度計)が手に置かれると、必要な操作のためにロボットに信号が送信されます。
送信セクションで使用される主要なコンポーネントには、加速度計、コンパレータ、HT12EICエンコーダおよび RF送信機 。
加速度計
加速度計は1つです センサーの種類 X、Y、Zの方向に移動しながらアナログデータを提供します。これらの方向はセンサーのタイプによって異なります。加速度計の図を以下に示します。このセンサーは矢印の方向で構成されています。センサーを一方向に傾けると、特定のピンのデータがアナログの形で変化します。加速度計は6つのピンで構成されています。 各ピンの機能 以下で説明します。

加速度計
- ピン1:VDDピンはこのピンに+ 5V電源を供給するために使用されます
- ピン2:GNDピンはバイアスの目的でグランドに接続されています
- ピン3:XピンはX方向のデータを受信します
- ピン4:YピンはY方向にデータを受信します
- ピン5:ZピンはZ方向のデータを受信します
- ピン6:STピンは、加速度計1.5gまたは2gまたは3gまたは4gの感度を調整するために使用されます
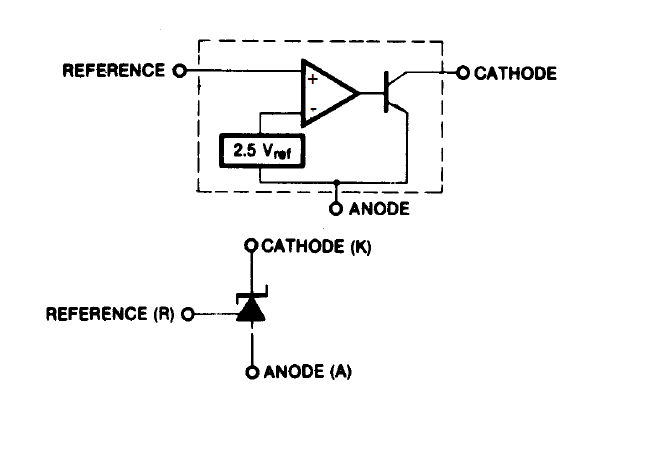
コンパレータ
コンパレータは、アナログ電圧をデジタル電圧に変更し、そのアナログ電圧を基準電圧と比較して、正確な低電圧または高電圧を与えるために使用されます。
エンコーダー
このエンコーダは、4ビットデータをエンコードするために使用され、RF送信機モジュールを使用して送信します。
RF送信機モジュール
RF TXモジュールは433MHzの周波数で動作し、このモジュールは低コストで市場で簡単に入手できます。
受信セクションで使用される主要なコンポーネントには、レシーバー、デコーダー、マイクロコントローラー、モータードライバーが含まれます。

送信機セクション
RFレシーバー
このプロジェクトのRF受信機は、送信デバイスによって転送されるデータを受信します。
デコーダ
デコーダーは、シリアルデータをRFレシーバーモジュールから受信するパラレルデータに変更するために使用されます。
マイクロコントローラー
ザ・ マイクロコントローラーは最も重要な部分です ロボットの。回路では8051ファミリのマイクロコントローラを使用して決定能力を提供します
モータードライバー
モータードライバーは、モーターのようなタスクを実行するための動きを与えるデバイスです。したがって、モータードライバーがコントローラーを介してそれらを実行する必要があります。モーターとマイクロコントローラー間のインターフェースは、この回路のL293DモータードライバーICを使用して行うことができます。
受信機セクションでは、RF受信機モジュールが送信機からデータを受信します。受信したデータはICHT12Dでデコードできます。受信したデータはAT89S51マイクロコントローラーで処理でき、モータードライバーを使用してモーターを制御します。

レシーバーセクション
ジェスチャ制御ロボットの動作
加速度計ベースのジェスチャー制御ロボットは、加速度計を手に置くと、手の動きに応じて動きます。ロボットの前に加速度計を置いて手を傾けると、ロボットは次の動きが与えられるまで前方に動き始めます。手を後ろに傾けると、ロボットはその方向と状態を変えます。その後、次の信号が出るまで逆方向に動き始めます。手を左側に傾けると、次の信号が出るまでロボットは左側に移動します。同様に、手を右側に傾けると、ロボットは右側に移動します。
アプリケーション
ザ・ 加速度計のアプリケーション ベースのジェスチャー制御ロボットには
- これらのロボットは、軍事用途でロボットを操作するために使用されます
- これらのロボットは、手術を目的とした医療用途で使用されます
- これらのロボット工学は建設分野で使用されています
- これらのロボット工学は、産業でトロリーとリフトを制御するために使用されます。
したがって、これはすべて、加速度計ベースのジェスチャ制御ロボット、その動作およびアプリケーションに関するものです。この概念をよりよく理解していただければ幸いです。さらに、この概念に関する疑問や エレクトロニクスプロジェクト 、下のコメントセクションにコメントしてフィードバックをお寄せください。ここにあなたへの質問があります、加速度計ベースのジェスチャー制御ロボットのアプリケーションは何ですか?
写真クレジット:
- 加速度計ベースのジェスチャ制御ロボット ytimg
- 加速度計 static.flickr







{kind=link}
{kind=link}