現代の世界では、 ロボットが重要な役割を果たす 。ロボットの主な目的は、人的資源を減らすことです。ロボットは、多くのアプリケーションの電子機器で使用されています。この記事では、Arduinoモジュールと8051マイクロコントローラーを使用してロボットを構築する方法について説明しました。 Arduinoでロボットを構築するために、障害物を回避したarduinoロボットについて説明します。必要なコンポーネントには、ロボット本体、DCモーター、超音波センサー、Arduinoモジュール、モータードライバーIC、Arduinoモジュールが含まれます。
ロボットの作り方は?
ザ・ 必要なコンポーネント ロボットを構築するには、次のものが含まれます
ロボット本体
の基本的なロボット本体 障害物回避のロボット 次の画像に示します。ロボット本体はプラスチック製の本体で、両側に車輪が付いています。ロボット本体の前には超音波センサーが配置されています。超音波センサーを使用することにより、障害物が検出できます。ロボットが動いているときに、超音波センサーによって障害物が検出されると、ロボットは脇に移動し、動き続けます。

ロボット本体
DCモーター
ザ・ DCモーターは電気モーターです そしてそれは直流電気で動きます。電気モーターの動作は電磁気学に基づいています。磁場は、外部磁場に置かれたときに電流を運ぶ導体によって生成され、導体の電流に比例した力を受けます。一般に、磁石は北から南に反対の極性の引力であることがわかっています極性は北から北、南から南のように同じで、磁石は反発します。

DCモーター
DCモーターの内部構成は、通電導体と外部磁場との間に磁気相互作用を付加して運動を生成するように設計されています。ここでは、2つのDCモーターを使用しています。各モーターには6vが含まれ、合計2つのDCモーターには12vが含まれています。次の画像で観察できるように、2つのDCモーターがロボット本体に配置されています。ロボット本体はDCモーターの助けを借りて動かされます

DCモーター付きロボット本体
Arduinoモジュール
次の画像は、arduinoモジュールの画像を示しています。ザ・ arduinoモジュール arduinoキットを使用した障害物回避ロボットの設計において重要な役割を果たします。 arduinoのレシーバーピンは超音波センサーの2番目のピンに接続され、arduinoモジュールの1番目、2番目、および3番目のピンはDCモータードライバーに接続されます。共通コンポーネントのコンデンサとダイオードも、バッテリー電源の助けを借りてarduinoモジュールに接続されています。

Arduinoモジュール
モータードライバーIC
DCモーターを動かすには モータードライバーIC 中古。モータードライバーのピン3、6、11、14はDCモーターに接続されています。入力ピン1と2はarduinoモジュールに接続され、イネーブルピンはarduinoのトランスミッタピンに接続されます。モータードライバーのピン4、5、12、13はアースに接続されています。

モータードライバーIC
超音波センサー
このコンセプトでは 超音波センサー 前方の障害物を検出するために使用され、コマンドをarduinoボードに送信します。入力信号に応じて、マイクロコントローラーはロボットを別の方向に移動するようにリダイレクトします。

超音波センサー
arduinoロボット障害物回避のアプリケーション
- arduinoロボットはどの表面でも動くことができます
- 冷蔵庫本体のように金属面を移動できます。
下の画像は、障害物回避のためのarduinoロボットを示しています

障害物回避のためのArduinoロボット
でロボットを構築するには 8051マイクロコントローラー 金属探知機ロボット車両について説明しています。 8051マイクロコントローラーでロボットを構築するために必要なコンポーネントは次のとおりです。
- 8051マイクロコントローラー
- DCモーター
- モータードライバー
- 金属探知機
- デコーダ
- エンコーダー
- ボタンを押す
- 結晶
- RF送信機と受信機
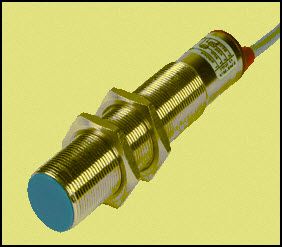
金属探知機
ザ・ 金属探知機 は、地面の金属を検出するために使用される1つまたは複数の金属コイルを備えたコイルです。金属探知機は、電磁誘導の原理に基づいて動作します。金属探知機は、最後の画像で観察できるPCBを介してロボット本体に接続されています。次の画像は、電子プロジェクトで使用される一般的な金属探知機を示しています。

金属探知機
ボタンを押す
押しボタンは、プラスチックや金属などの硬質金属でできているボタンです。通常、プッシュボタンはマイクロコントローラのプログラムをリセットするために使用されます。次の画像は、プッシュボタンの画像を示しています。

ボタンを押す
8051マイクロコントローラー
ザ・ 8051マイクロコントローラーは40ピンで構成されています 。マイクロコントローラの4番目と5番目のピンは水晶発振器に接続されています。 Vccピンは5Vの電源に供給され、グランドピンはグランドに接続されています。マイクロコントローラのピン15、16、18、19は、HT12EのエンコーダICに接続されています。マイクロコントローラのピン2、7、8、9は押しボタンに接続されています。
抵抗、コンデンサ、水晶発振器、8051シリーズマイクロコントローラ、エンコーダなどのすべてのコンポーネントを接続した後の次の画像がオンになっています プリント基板 。

PCB接続
下の画像は、8051シリーズマイクロコントローラーを搭載した金属探知機ロボットを示しています。

8051シリーズマイクロコントローラーを搭載した金属探知機ロボット
この記事では、 arduinoと8051マイクロコントローラーでロボットを構築する方法 。この記事を読んで、ロボットを構築するための基本的な知識が得られたことを願っています。この記事または電子機器について質問がある場合は コミュニケーションプロジェクト 、以下のセクションにコメントしてください。これがあなたへの質問です、 8051シリーズマイクロコントローラとは何ですか?
。