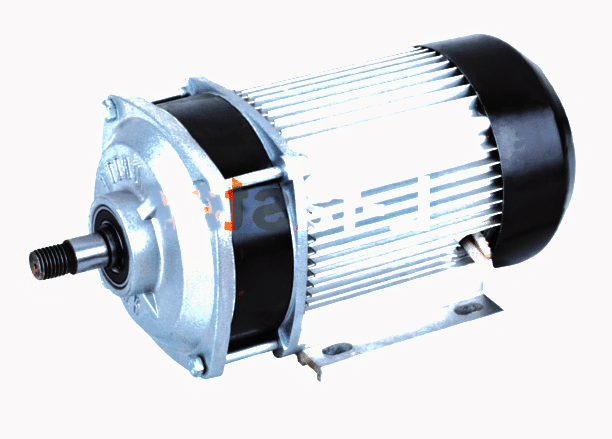
あ サーボモーター またはサーボは、機械部品を高精度で回転させるために使用される電気モーターの一種です。このモーターには、モーターのシャフトの現在の位置に関するフィードバックを提供する制御回路が含まれているため、このフィードバックにより、これらのモーターを高精度で回転させることができます。サーボモーターは、ある距離または角度でオブジェクトを回転させるのに役立ちます。このモーターは、ACサーボモーターとDCサーボモーターの2種類に分類されます。サーボモーターがDC電源を使用して動作する場合、モーターはDCサーボモーターと呼ばれ、AC電源で動作する場合はACサーボモーターと呼ばれます。このチュートリアルでは、 DCサーボモーター – アプリケーションの操作。
DCサーボモータとは
DC 電気入力を使用して位置、速度、または加速度などの機械的出力を生成するサーボモーターは、DC サーボモーターと呼ばれます。一般に、これらのタイプのモーターは、数値制御機械、コンピューター、およびその他多くの始動と停止が行われる場所で原動機として使用されます。正確かつ非常に迅速に。

DCサーボモーターの構造と働き
DC サーボ モーターは、次のブロック図に示すさまざまなコンポーネントで構成されています。この図では、各コンポーネントとその機能について以下で説明します。

これに使用されるモーターは、別励磁される界磁巻線を含む典型的な DC モーターです。そのため、励起の性質に応じて、さらにアーマチュア制御およびフィールド制御のサーボ モーターに分類できます。
これで使用される負荷は、モーターの機械シャフトに単純に接続された単純なファンまたは工業用負荷です。
この構造のギアボックスは機械式変換器のように機能し、アプリケーションに応じて加速度、位置、速度などのモーターの出力を変更します。

位置センサーの主な機能は、負荷の現在位置に相当するフィードバック信号を取得することです。一般に、これはギア機構を介してモーターシャフトの絶対角度に比例する電圧を提供するために使用されるポテンショメーターです。
“4〜2エンコーダ回路図 ”
コンパレータ機能は、位置センサの o/p と基準点を比較してエラー信号を生成し、それをアンプに与えることです。 DC モーターが正確に制御されて動作する場合、エラーはありません。位置センサー、ギアボックス、コンパレーターにより、システムは閉ループになります。
アンプ機能は、コンパレータからのエラーを増幅し、DC モーターに供給することです。そのため、定常状態誤差がゼロになるようにゲインが強化されると、比例コントローラーのように機能します。
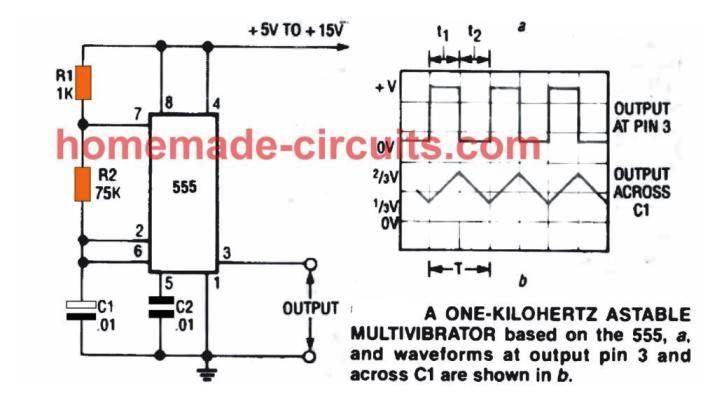
制御された信号は、フィードバック信号に応じて PWM (パルス幅変調器) に入力を与えるため、正確な制御のためにモーターの入力を変調します。さらに、このパルス幅変調器は、基準波形とコンパレータを利用してパルスを生成します。
閉ループ システムを作成することにより、加速度、速度、または正確な位置が得られます。名前が示すように、サーボモーターは、フィードバックとコントローラー効果により、好ましい出力を提供する制御されたモーターです。エラー信号は単純に増幅され、サーボモーターを駆動するために利用されます。制御信号とパルス幅変調器生成の性質に応じて、これらのモーターには FPGA チップまたはデジタル信号プロセッサを使用した優れた制御方法があります。
DCサーボモーターの働きは次のとおりです。入力信号が DC モーターに適用されると、シャフトとギアが回転します。基本的に、ギア出力の回転は位置センサー (ポテンショメーター) にフィードバックされ、そのノブが回転して抵抗が変化します。抵抗が変化するたびに、電圧が変化します。これは、コントローラーに供給されるエラー信号であり、その結果、PWM が生成されます。
DC サーボ モーターの種類の詳細については、次のリンクを参照してください。 さまざまな種類のサーボ モーター .
DCサーボモーターの伝達関数
伝達関数は、o/p 変数のラプラス変換 (LT) と LT ( ラプラス変換 ) i/p 変数の一般に、DC モーターはエネルギーを電気から機械に変換します。アーマチュア端子に供給された電気エネルギーは、制御された機械エネルギーに変換されます。
電機子制御の DC サーボ モーターの伝達関数を以下に示します。

θ(s)/Va(s) = (K1/(Js2 + Bs)*(Las + Ra)) /1 + (K1KbKs)/(Js2 + Bs)*(Las+Ra)
フィールド制御 DC サーボモーターの伝達関数を以下に示します。

θ(s)/Vf(s)=Kf/(sLf+Rf)×(s2J+Bs)
アーマチュア制御 DC サーボ モーターは、閉ループ システムであるため、開ループ システムであるフィールド制御 DC サーボ モーターと比較して優れた性能を提供します。また、フィールド制御システム内では応答速度が遅い。アーマチュア制御の場合、アーマチュアのインダクタンスは無視できますが、フィールド制御の場合は同じではありません。しかし、インフィールド制御ではダンピングの改善は達成できませんが、アーマチュア制御では達成できます。
仕様
DC サーボ モーターは、以下を含む性能仕様を提供します。これらの仕様は、モーターのサイズを正しく設定するために、アプリケーションの負荷要件に基づいて一致させる必要があります。
- シャフト速度は、シャフトが回転するポイントの速度を単純に定義し、RPM (回転/分) で表されます。
- 通常、メーカーが提供する速度は、o/p シャフトの無負荷速度、またはモーターの出力トルクがゼロになる速度です。
- 端子電圧は、モーター速度を決定するモーターの設計電圧です。この速度は、モーターへの供給電圧を増減することによって簡単に制御されます。
- DCサーボモーターのシャフトによってトルクのような回転力が発生します。したがって、このモーターに必要なトルクは、対象アプリケーション内で発生するさまざまな負荷の速度-トルク特性によって単純に決定されます。このトルクには、始動トルクと連続トルクの 2 種類があります。
- 起動トルクとは、サーボモータを起動する際に必要なトルクです。このトルクは通常、連続トルクに比べて高くなります。
- 連続トルクとは、一定の運転状態におけるモーターの容量である出力トルクです。
- これらのモーターは、信頼性を確保するために、必要な負荷とモーター定格の間に 20 ~ 30% のマージンを含め、アプリケーションに十分な速度とトルク容量を備えている必要があります。これらのマージンが大きすぎると、コストの有効性が低下します。 Faulhaber の 12V DC コアレス DC サーボ モーターの仕様 それは:
- ギアボックス比は 64: l 遊星 3 段ギアボックス。
- 負荷電流は 1400 mA です。
- パワーは17W。
- 速度は120RPMです。
- 無負荷電流は75mAです。
- エンコーダーのタイプはオプティカルです。
- エンコーダーの分解能は、O/P シャフトの 768CPR です。
- 直径は30mmです。
- 長さは42mmです。
- 全長は85mm。
- シャフト径は6mm。
- シャフトの長さは35mmです。
- ストールトルクは52kgcm。
特徴
の DCサーボモータの特性 以下のものが含まれます。
- DC サーボ モーターの設計は、永久磁石または別励式の DC モーターに似ています。
- このモーターの速度制御は、電機子電圧を制御することによって行われます。
- サーボモーターは、アーマチュア抵抗が高い設計になっています。
- 素早いトルク応答を実現します。
- 電機子電圧内のステップ変化により、モーターの速度が急速に変化します。
ACサーボモーター対DCサーボモーター
DCサーボモータとACサーボモータの違いは以下のとおりです。
|
ACサーボモーター |
DCサーボモーター
|
| AC電気入力を利用して機械的出力を生成する一種のサーボモータは、ACサーボモータと呼ばれます。 | DC 電気入力を利用して機械的出力を生成する一種のサーボモーターは、DC サーボモーターと呼ばれます。 |
| ACサーボモーター採用で低出力。 | DCサーボモーター搭載で高出力。 |
| これらのモーターは、高速動作条件に合わせて調整可能です。 | これらのモーターは、低速動作条件用に調整可能です。 |
| これらのタイプのモーターは高トルクを発生します。 | これらのタイプのモーターは低トルクを発生します。 |
| このモーターの動作は安定しており、スムーズでノイズが少ないです。 | このモーターの動作は安定性が低く、騒音が大きくなります。 |
| これらのモーターは効率が低くなります。 | これらのモーターは高効率です。 |
| これらのモーターには、安定性の問題がほとんどありません。 | これらのモーターには、より多くの安定性の問題があります。 |
| これらのモーターでは、電子ノイズの問題はありません。 | これらのモーターでは、ブラシの存在による電子ノイズの問題があります。 |
| これらのモーターのメンテナンスは少なくなります。 | ブラシと整流子が存在するため、これらのモーターのメンテナンスは高くなります。 |
| これらは軽量で小さいサイズです。 | これらは重くて大きいサイズです。 |
| これらのモーターは、低電力ベースのアプリケーションに適しています。 | これらのモーターは、高出力ベースのアプリケーションに適しています。 |
ArduinoとインターフェースするDCサーボモーター
正確で必要な角度で DC サーボ モーターを制御するには、Arduino ボード/その他のマイクロコントローラーを使用できます。このボードには、正確な角度でサーボ モーターを回転させるための PWM 信号を生成するアナログ o/p があります。 Arduino を使用して、ポテンショメータまたはプッシュ ボタンでサーボ モーターの角度位置を移動することもできます。
サーボモーターは、すぐに入手できるIRリモートで制御することもできます。このリモコンは、DC サーボ モーターを特定の角度に動かしたり、赤外線リモコンでモーターの角度を直線的に増減したりするのに役立ちます。
ここでは、Arduino を使用して特定の角度で IR リモートを使用してサーボ モーターを動かす方法と、リモートで時計回りと反時計回りにサーボ モーターの角度を増減する方法について説明します。 DC サーボモーターと Arduino および IR リモートとのインターフェース図を以下に示します。このインターフェースの接続は次のとおりです。

このインターフェースは主に、DC サーボ モーター、Arduino ボード、TSOP1738 IR センサーなどの 3 つの必須コンポーネントを使用します。このセンサーには、Vcc、GND、および出力のような 3 つの端子があります。このセンサーの Vcc 端子は Arduino Uno ボードの 5V に接続され、このセンサーの GND 端子は Arduino ボードの GND 端子に接続され、出力端子は Arduino ボードのピン 12 (デジタル入力) に接続されます。
デジタル出力ピン5は、サーボモーターの信号入力ピンに接続するだけでモーターを駆動できます
DC サーボ モーターの +ve ピンは外部 5V 電源に与えられ、サーボ モーターの GND ピンは Arduino の GND ピンに与えられます。
働く
赤外線リモコンは、30 度、60 度、90 度の 2 つのアクションを実行するために使用され、モーターの角度を 0 から 180 度に増減するためにも使用されます。
リモコンには、数字ボタン (0 ~ 9)、角度制御用のボタン、矢印キー ボタン、上下ボタンなどの多くのボタンがあります。1 ~ 5 のいずれかの数字ボタンを押すと、DC サーボ モーターがその位置に移動します。角度アップ/ダウン ボタンを押すと、モーターの角度を正確に ±5 度に設定できます。
ボタンが決定されると、これらのボタンのコードをデコードする必要があります。リモコンのいずれかのボタンが押されると、必要なアクションを実行するためのコードが 1 つ送信されます。これらのリモート コードをデコードするには、インターネットから IR リモート ライブラリを使用します。
次のプログラムを Arduino にアップロードし、IR センサーを接続します。リモコンを赤外線センサーに向けて置き、ボタンを押します。その後、シリアルモニターを開き、押されたボタンのコードを数字で監視します。
Arduinoコード
#include
#include
サービス service1;
int IRpin = 12; // IR センサーのピン
int motor_angle=0;
IRrecv irrecv(IRpin);
decode_results 結果;
ボイドセットアップ()
{
Serial.begin(9600); // シリアル通信の初期化
Serial.println(“赤外線リモコンサーボモーター”); //メッセージを表示
errecv.enableIRIn(); // 受信機を起動
サーボ1.アタッチ(5); // サーボモーターピンを宣言
サーボ1.書き込み(モーター角度); // モーターを 0 度に移動
Serial.println(“サーボモータ角度 0 度”);
遅延 (2000);
}
空ループ()
{
while(!(irrecv.decode(&results))); // ボタンが押されなくなるまで待つ
if (irrecv.decode(&results)) // ボタンが押されてコードが受信されたとき
{
if(results.value==2210) // 1 桁目のボタンが押されたかどうかを確認します
{
Serial.println(“サーボモーター角度30度”);
モーター角度 = 30;
サーボ1.書き込み(モーター角度); // モーターを 30 度に動かす
}
else if(results.value==6308) // 2 桁目のボタンが押された場合
{
Serial.println(“サーボモーター角度60度”);
モーター角度 = 60;
サーボ1.書き込み(モーター角度); // モーターを 60 度に動かす
}
else if(results.value==2215) // すべての数字ボタンについて同様に
{
Serial.println(“サーボモーター角度90度”);
モーター角度 = 90;
サーボ1.書き込み(モーター角度);
}
そうでなければ (results.value==6312)
{
Serial.println(“サーボモーター角度120度”);
モーター角度 = 120;
サーボ1.書き込み(モーター角度);
}
そうでなければ (results.value==2219)
{
Serial.println(“サーボモーター角度150度”);
モーター角度 = 150;
サーボ1.書き込み(モーター角度);
}
else if(results.value==6338) // 音量UPボタンが押された場合
{
if(motor_angle<150) motor_angle+=5; // モーターの角度を増やす
Serial.print(“モーター角度は”);
Serial.println(motor_angle);
サーボ1.書き込み(モーター角度); // モーターをその角度に動かします
}
else if(results.value==6292) // 音量を下げるボタンが押された場合
{
if(motor_angle>0) motor_angle-=5; // モーター角度を下げる
Serial.print(“モーター角度は”);
Serial.println(motor_angle);
サーボ1.書き込み(モーター角度); // モーターをその角度に動かします
}
遅延 (200); // 0.2秒待つ
errecv.resume(); // 再び次のコードを受け取る準備が整う
}
}
DCサーボモーターへの電源は外部5Vから供給&IRセンサー&Arduinoボードへの電源はUSBから供給。サーボモーターに電力が供給されると、0度に移動します。その後、シリアルモニタに「サーボモータ角度が 0 度です」と表示されます。
リモコンでは、ボタン 1 を押すと、DC サーボ モーターが 30 度動きます。同様に、2、3、4、または 5 などのボタンを押すと、モーターが 60 度、90 度、120 度、または 150 度などの希望の角度で動きます。これで、シリアル モニタにサーボ モータの角度位置が「サーボ モータ角度 xx 度」として表示されます。
音量を上げるボタンを押すと、モーターの角度が 5 度増加します。つまり、60 度の場合は 65 度に移動します。そのため、新しい角度の位置がシリアル モニターに表示されます。
同様に、角度ダウン ボタンを押すと、モーターの角度が 5 度減少します。つまり、角度が 90 度の場合、モーターは 85 度に移動します。 IR リモートからの信号は、IR センサーによって感知されます。それがどのように感知し、IRセンサーがどのように機能するかを知るには、クリックしてください ここ
そのため、新しい角度の位置がシリアル モニターに表示されます。したがって、ArduinoとIRリモートを使用して、DCサーボモーターの角度を簡単に制御できます。
DC モーターを 8051 マイクロコントローラーに接続する方法については、クリックしてください。 ここ
DCサーボモーターのメリット
の DCサーボモーターのメリット 以下のものが含まれます。
- DCサーボモーターの動作が安定しています。
- これらのモーターは、モーターのサイズと重量よりもはるかに高い出力を備えています。
- これらのモーターが高速で動作する場合、ノイズは発生しません。
- このモーター操作は、振動と共振がありません。
- これらのタイプのモーターは、慣性比に対するトルクが高く、負荷を非常に迅速に拾うことができます。
- それらは高い効率を持っています。
- 彼らは迅速な対応をします。
- これらはポータブルで軽量です。
- 四象限の操作が可能です。
- 高速では、これらは聞こえるほど静かです。
の DCサーボモーターのデメリット 以下のものが含まれます。
- DCサーボモーターの冷却機構が非効率です。したがって、このモーターは、換気されるとすぐに汚染されます。
- このモーターは、より高いトルク速度で最大出力を生成し、定期的なギアリングが必要です。
- これらのモーターは、過負荷によって損傷する可能性があります。
- 設計が複雑で、エンコーダが必要です。
- これらのモーターは、フィードバック ループを安定させるために調整が必要です。
- メンテナンスが必要です。
DCサーボモーターのアプリケーション
の DCサーボモーターの応用 以下のものが含まれます。
- DC サーボ モーターは、工作機械で金属を切断および成形するために使用されます。
- これらは、アンテナの位置決め、印刷、パッケージング、木工、テキスタイル、より糸またはロープの製造、CMM (座標測定機)、材料の取り扱い、床の研磨、ドアの開閉、X-Y テーブル、医療機器、およびウエハーの回転に使用されます。
- これらのモーターは、航空機の制御システムで使用されます。スペースと重量の制限により、単位体積ごとに高出力を実現するモーターが必要になります。
- これらは、送風機ドライブやファンのように高い始動トルクが必要な場合に適用できます。
- これらは、主にロボット工学、プログラミング デバイス、電気機械アクチュエータ、工作機械、プロセス コントローラなどにも使用されます。
したがって、これは DC の概要です。 サーボモーター – 作動中 アプリケーションで。これらのサーボ モーターは、さまざまな産業で使用され、多くの機械的な動きに対するソリューションを提供します。これらのモーターの機能により、非常に効率的で強力になります。 ACサーボモータとは?