
通常、リモートコントロールロボットはRF回路を使用しますが、動作範囲、制御、周波数範囲が制限されるという欠点があります。これらの欠点を克服するために、 携帯電話で操作するランドローバー ロボット車両を使用しています。ロボット制御、侵入のないコントローラー、最大12の制御システムなどの利点を提供します。
“蠕動ポンプの長所と短所 ”
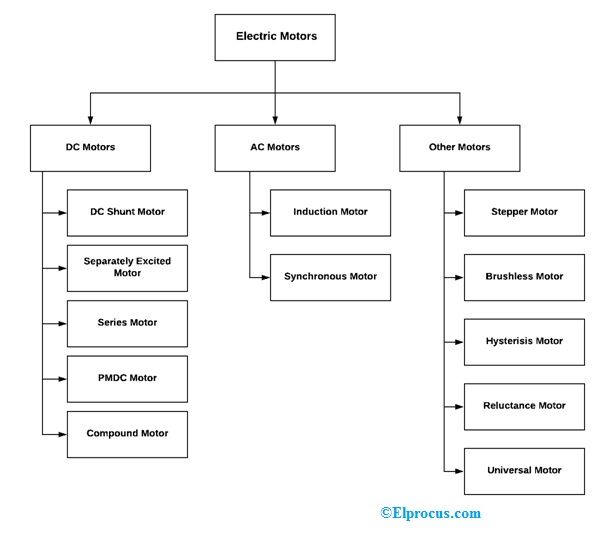
の機能と外観が 埋め込みロボティクス 大きく異なりますが、すべてのロボットは、何らかの制御下で移動可能な機械構造の機能を共有しています。ロボットの制御には、知覚、処理、アクションの3つの異なるフェーズが含まれます。通常、センサーはロボットに取り付けられています。知覚と処理はオンボードマイクロコントローラーによって行われ、アクションはモーターを使用して実行されます。
携帯電話で操作するランドローバーロボット車両

Edgefxkits.comによる携帯電話操作のランドローバーロボット車両
このプロジェクトの主な目的は、携帯電話を使用して、ロボット車両に取り付けられたロボットアームを制御することです。広い動作範囲とロバスト制御などを提供します。
携帯電話で操作するランドローバーロボット車両のブロック図:

携帯電話で操作するランドローバーのブロック図
主要な構成要素は、マイクロコントローラー、携帯電話、DTMFデコーダー、およびDCモータードライバー回路です。携帯電話は、システム全体が機能し、携帯電話によってアクティブ化されるため、システム全体の最も重要な部分です。 DTMF(デュアルトーン多重周波数) 携帯電話からの入力信号を受信してデコードし、4ビットデジタル出力を生成します。 8051マイクロコントローラー 。 DTMFデコーダがデジタル出力を提供すると、毎回割り込みも生成されます。
マイクロコントローラは、制御アクション全体を実行するため、システム全体の心臓部です。マイクロコントローラーは、DTMFデコーダーによって生成されたコードに依存して、両方のDCモーターを回転させることによってローバーを右または左および前後に移動します。 DCモータードライバーは、マイクロコントローラーからローロジックまたはハイロジックのアクティブ化信号を受信し、2つのモーターを増幅して両方向に回転させます。
“12VLED電源回路 ”
ロボットの制御には、主に4つの異なるフェーズが含まれます。知覚、アクション処理、および検出です。知覚段階で、ロボットに接続された携帯電話が電話を受けた場合、携帯電話のキーを押すと、生成されたDTMFトーンがデコードされます。次に、デコーダチップは携帯電話からオーディオ信号を受信し、DTMFトーンをバイナリコードに変換します。バイナリコードはマイクロコントローラに送られます。このプロジェクトでは、MT88710ICをDTMFデコーダーとして使用します。処理段階では、マイクロコントローラーはDTMFデコーダーから受信したバイナリコードを処理します。ザ・ マイクロコントローラーは「C」で事前にプログラムされています 入力ビットに従ってこの特定のタスクを実行します。
アクションステージでは、モーターの回転はマイクロコントローラーからの入力に依存します。ランドローバーにはそれぞれ30RPMの2つのDCモーターが使用され、モータードライバーICによって駆動されます。ステージの検出時、および障害物の検出の場合、 赤外線送信機と受信機 ブザーと一緒に使用します。障害物がロボットの前に来ると、IR送信機が物体に赤外線を送信し、物体が赤外線をIR受信機に反射します。次に、IRレシーバーはIR光線を受信してブザーを作動させます。
携帯電話で操作するランドローバーロボット車両の回路図:
この携帯電話で動作するロボットランドローバーの主なコンポーネントは、マイクロコントローラー、モータードライバー、DTMFデコーダーです。このプロジェクトでは、MT8870シリーズDTMFデコーダーを使用します。このデコーダーは、デジタルカウント技術を使用して、16個のDTMFトーンペアを検出して4ビットコード出力にします。内蔵のダイヤルトーン回路により、プレフィルタリングが不要になります。ピン2に入力信号が与えられると、入力構成が有効であると認識されます。 DTMFトーンの4ビットデコード信号は、ピン14の出力を介してピン11に転送されます。これらのピンは、マイクロコントローラのピンPao、Pa1、Pa2、およびPa3に接続されています。ポートピンPD0からPD3およびPD7からのマイクロコントローラーの出力は、入力IN1、IN4に供給され、モータードライバーL293D ICのピンEN1、EN2を有効にします。 2つのDCモーターを駆動します 。

携帯電話で作動するランドローバーの回路図
この回路では、S1スイッチが手動リセットに使用されます。マイクロメータの出力はDCモーターを駆動するのに十分ではないため、モーターの回転には電流ドライバーが必要です.L293Dモータードライバーは、4.5V〜36Vの電圧で最大600mAの双方向駆動電流を提供するように設計されています。 DCモーターの駆動が簡単です。 L293Dモータードライバーは4つのドライバーで構成されています。ピンIN1からIN4およびOUT1とOUT4は、ドライバ1からドライバ4の入力ピンと出力ピンです。ドライバ1、2、3、および4は、イネーブルピン1(EN1)とピン9(EN2)によってイネーブルになります。イネーブル入力EN1(ピン1)がハイの場合、ドライバ1と2がイネーブルになります。同様に、イネーブル入力EN2(ピン9)はドライバ3をイネーブルにします。
長所と短所:
携帯電話で動作するロボットランドローバーの利点には、ワイヤレス制御のプロビジョニングおよび監視システム、3Gテクノロジーベースの車両ナビゲーション、および携帯電話のネットワークに基づく無制限の動作範囲が含まれます。不利な点は次のとおりです。携帯電話の請求が高いため、コストがかかる モバイルバッテリーが放電します :負荷が高いため、急速放電によりバッテリーが充電されなくなるため、バッテリーに関連する放電の問題適応性が高い:システムはすべての携帯電話に適応できるわけではありませんが、ヘッドセットが取り付けられているもののみが使用できます。
したがって、この携帯電話で動作するロボットプロジェクトは、携帯電話を使用して軍用車両を制御する軍事用途で非常に役立ちます。将来的には、アレンジすることで敵の位置を検出することができます ワイヤレスカメラ ランドローバーロボット車両に。学生はこのプロジェクトで提案されているさまざまな用語や原則を学ぶことができるため、このプロジェクトは学者にも役立ちます。このプロジェクトは、学生が革新的な考えやアイデアをに追加するのに役立ちます ロボットプロジェクトを開発する 。
写真クレジット:
- 携帯電話で操作するランドローバー santoshbanisetty
- 携帯電話で操作するランドローバーの回路図 エンジニアガレージ





{kind=link}