投稿では、マイクロコントローラーや複雑なジョイスティックを実装せずに、433kHzのRFモジュールを使用した単純なRCヘリコプターのリモートコントロール回路について説明しています。
アイデアはジテンドラ氏から依頼されました。
回路の目的と要件
- 大規模なRCヘリコプターを作っています。私は4つのモーターを使用しています。 1番目のメイン12vモーターの場合:メカニズムは、その速度をリモートのコントローラーキーで0からフルスピードまで制御することです。
- 2番目の3vモーターの場合:そのメカニズムは、ローターのスワッシュプレートを操作するため、各モーターのリモコンにある個別のキーを使用した正転および後進専用です。
- 3番目の9Vテールモーターの場合:ヘリコプターのレシーバーボードにあるレギュレーターを使用して平衡速度に設定する必要があります。これにより、速度を手動で調整して、チョッパーがローターと一緒に回転するのを防ぐことができます。キーがあります。リモートは、モーターを平衡状態から減速および加速することです。
- レシーバーボードの入力電力は12vで、電流は8〜10アンペアになります。 500〜800メートルの範囲である必要があります。そんなRC基板をリモコンと一緒にデザインしていただけませんか。
- 私はこの2年からそのような回路基板を探しています。
- 私のプロジェクトは、その不在のために中止されました。助けてください。便宜上、2つの個別のrc回路基板を設計できます。1つはメインモーターとテールモーター用で、もう1つは2つの正回転モーターと逆回転モーター用です。
- ただし、両方の回路の入力電流と電位差は同じである必要があり、同じ範囲はリモコンまたはリモコンで500〜800メートルです。番号付けに必要なコンポーネントの名前も記載してください。
デザイン
提案されたRCヘリコプターを構築するために必要な要求された回路モジュールは次のとおりです。
1)12VPWM可変速度コントローラー
2)3Vモーター逆順方向コントローラー回路。
3)可変速コントローラー回路を備えた9Vモーターレギュレーター。
上記のすべての仕様は、433MHzの長距離を介して制御する必要があります RFリモートコントロールモジュール 。
必要な433MHzRFリモートモジュールは、任意のオンラインストアまたは最寄りの電気販売店から購入できます。リモコンの範囲は、RCヘリコプターの範囲の必要な仕様に従う必要があります。ここでは、1km以内であると想定されています。
説明したRCヘリコプターのリモートコントロール回路には、以前に使用したものとまったく同じ6チャンネルのRFリモートモジュールが必要です。 最も単純なドローンリモートコントロール回路 。
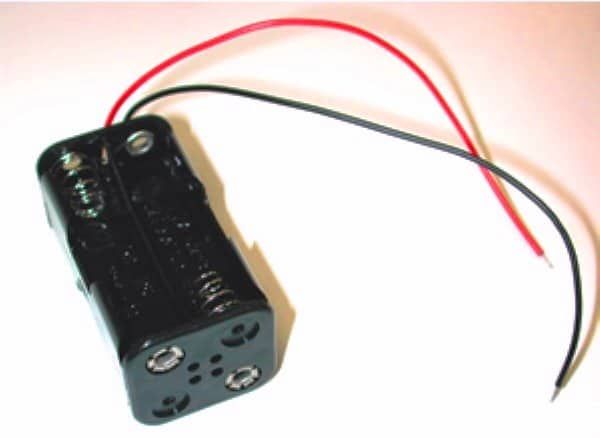
同じの画像は以下で目撃することができます:

左側の緑色のボードは、6つの制御リレーを備えたリモートレシーバーモジュールです。このユニットは、必要な制御操作のためにRCヘリコプター内に設置する必要があります。
右側のユニットは、ユーザーが保持することになっている送信機の受話器と、対応するモーションコントロール情報を使用してリレーボードに命令するために押された関連ボタンです。
次に、6つのリレーをさまざまなPWM回路で構成し、RCチョッパー内に取り付ける必要がある方法を次の詳細から見てみましょう。
レシーバーボードに表示されているリレー接点はデフォルトですべて空白であることに注意してください。つまり、N / CおよびN / O接点は配線されておらず、次の図に示すように配線する必要があります。
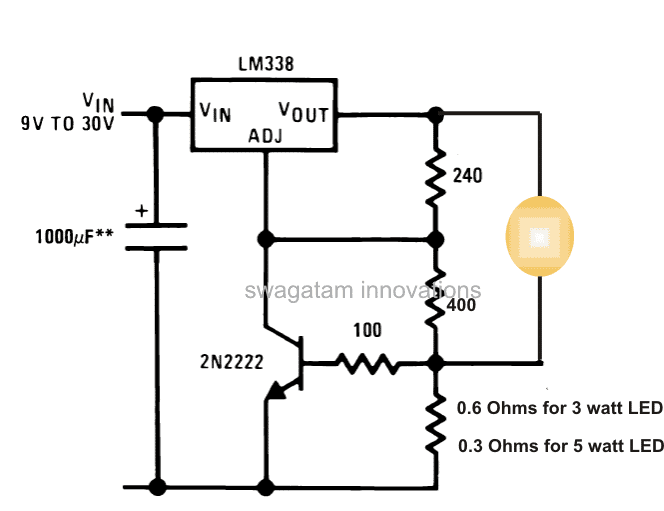
リクエストに応じて、9Vモーターと12Vモーターの速度は、その後のリモートハンドセットの押下によって制御する必要があります。この機能を実装するための回路を以下に示します。
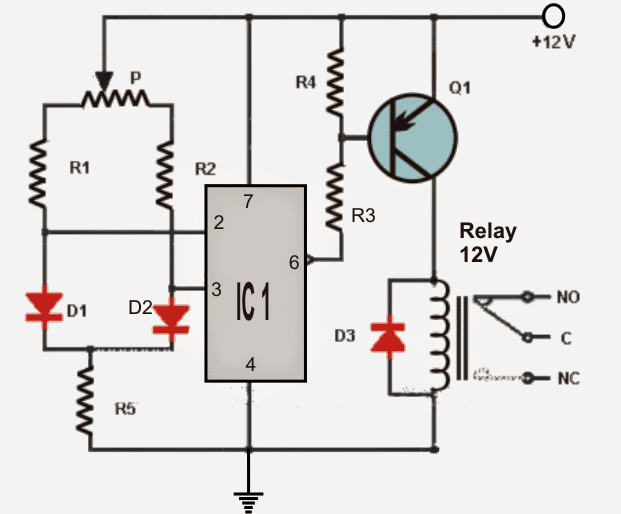
モータードライバーの回路図


回路動作
回路図に見られるように、いくつかの同一のもの IC 555PWM回路 目的のために採用されています。 6つのリレーのうち4つがここで使用され、関連する接点が示されている接続に配線されています。
デザインでは IC 555は、基本的な非安定回路として装備されています。 特定の周波数で発振するように割り当てられています R1、R2、およびCコンポーネントの値によって異なります 。
IC741の形態の電圧フォロワは、示されたリレー動作に従ってIC555のピン#3のPWM含有量を変化させるために、IC555の制御ピン#5で構成される。
IC 741のピン#3の電圧は、ピン#6、続いてIC 555のピン#5で追跡または転送されます。ピン#3のコンデンサの充電レベルに応じて、この変動電圧は供給電圧制限とゼロ。
コンデンサの充電レベルは、コンデンサを充電するか、関連するリレー接点のアクティブ化を介して放電するだけで変化または変更されます。上部リレー接点を充電するには、IC 555のピン#5で電圧を上昇させるために閉じたりアクティブにしたりしますが、下部リレー接点をアクティブにするとコンデンサが放電し、それに比例してIC 555のピン#5に低い電圧が現れます。
上記のアクションは、ピン#3の結果を対応して変化するPWMに変換します。これにより、モーターの動作が速くなったり遅くなったりします。
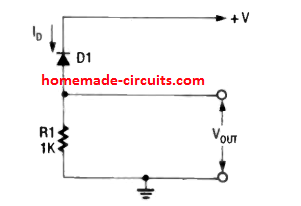
9Vモーターの場合、ドライバートランジスタのエミッターに一連のダイオードが接続されているのがわかります。これにより、必要な電圧降下が保証され、モーターの仕様に従って12Vを約10Vの安定化電源に変換できます。
3Vモーター逆前進操作
リクエストの3番目で最後の要求は リバース/フォワード制御 RF送信機の受話器のボタンを使用して3Vモーターの。
残りの2つのリレーは、この特定の実行に使用できるようになり、次の図に示すように実行されます。

ここでも、精密なPWMジェネレータ回路として配線された多用途のIC555を採用しています。 PWMは、モーターの速度がヘリコプターの必要な平衡に完全に調整されるように、設置を完了する前に5Kプリセットを介して適切に設定されます。
リレーは、DPDTリレーを形成するペアのリレー接点の切り替えに応じて、モーターに必要な逆方向および順方向または時計回りまたは反時計回りの動きを強制するように単純に配線されていることがわかります。
短絡を防ぐために、好ましくは、これらの2つのリレーのレシーバーモジュールを変更して、いずれかのボタンを押すと、アクティブ化のために同期して押される2つのスイッチに応じて、両方のリレーが一緒にアクティブ化されるようにします。
この切り替えにより、モーターの回転が即座に反対方向に反転し、ユーザーはRCヘリコプターマシンで必要な方向変更を実行できるようになります。
これで、提案されたRCヘリコプターのリモートコントロール回路の回路とリレーの配線手順は終わりです。さらに疑問がある場合は、コメントで遠慮なく表現してください。
前:超音波スマート自動ON / OFFスイッチ回路 次へ:シングルMOSFETクラスAパワーアンプ回路