ここで紹介する5つの簡単なドライランプロテクター回路は、地下タンク内にプローブを導入せずに地下タンク内の不十分な水状態を感知して、モーターのドライランの可能性を防ぐ簡単な方法を示しています。この回路には、オーバーヘッド水オーバーフロー制御機能も組み込まれています。
このアイデアは、このブログの関心のある読者の1人からリクエストされました。
技術仕様
地下からモーターの場所にワイヤーを移動するのにより多くの作業が必要になるため、地下タンクをチェックせずにオーバーヘッドタンクの入口をチェックしてドライランモーターを感知する方法について何か考えがありますか?
私の要件は、タンクの入口に水が流れていない場合はモーターを停止する必要があることです。また、タンクの入口で水を押すのに少なくとも5秒かかるため、モーターは最初はオフにしないでください。
私の要件は、モーターが水を汲み上げることができないときにモーターをオフにすることです。これは、地下タンクの水位が特定のしきい値を下回ったか、ポンプが故障していることが原因である可能性があります。
私の好みは、地下タンクから回路にワイヤーをリンクすることではありません。私の好みは、頭上のタンク入口の水流を感知することです。あなたが私の要件を理解したことを願っています。
手動でモーターのスイッチを入れたいのですが。ブザーをリレーに交換すると、タンクの入口に水が流れるのに数秒かかるため、モーターをオンにするとすぐにモーターがオフになります。
この問題を回避するために、タンク入口での水の流れを感知するために、ある程度の時間遅延を設ける必要があります。しかし、遅延を導入する方法がわかりません。これについて私を助けてください。

デザイン#1
提案された地下水ポンプモータードライランプロテクターの回路は、以下の詳細の助けを借りて理解することができます:
回路は12VAC / DCアダプターで給電されます。
押しボタンを瞬間的に押すと、BC547トランジスタとBC557リレードライバステージがオンになります。
470uFのコンデンサと1Mの抵抗は、時間遅延ネットワークを形成し、プッシュボタンが離された後、リレードライバステージ全体を所定の遅延の間ロックします。
この遅延間隔は、470uFのコンデンサや1Mの抵抗を試して調整できます。
リレーが作動するとすぐにモーターがオンになり、頭上のタンクに水を引き込み始めます。
オーバーヘッドタンクパイプ内の水がその残留水と接続する瞬間、ポジティブプローブである水中プローブは、パイプの口に導入されたプローブとリンクされます。これにより、下部プローブからの電圧が、水と1K抵抗を介して関連するBC547トランジスタのベースに到達できるようになります。
上記のアクションにより、リレードライバステージがラッチされ、時間遅延が経過した後でも、リレーは動作を保持して維持します。
現在、モーターは次の2つの条件下でのみ停止します。
1)水位がオーバーヘッドタンクのオーバーフローレベルに達した場合、下部プローブからの正の電位が上部BC547トランジスタのベースに接続されているプローブに接続されます。
状態は上部BC547をオンにし、リレードライバーステージのラッチを即座に解除してモーターを停止します。
2)地下タンク内の水が乾くと、明らかにオーバーヘッドタンクパイプ内の水リンクが停止し、リレードライバーのラッチが壊れます。
ドライラン保護システムを備えた上記のサンプモーターコントローラーの自動バージョンは、以下で確認できます。

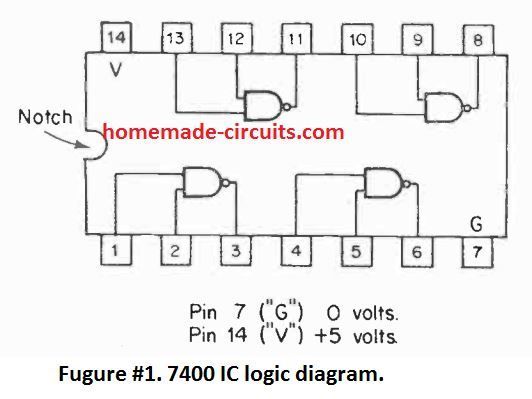
使用する 論理ゲート :デザイン#2
以下に示すように、IC 4049の6つのNOTゲートを使用して完全自動バージョンを構築することもできます。この構成は、上記の自動地下水中ウォーターポンプドライラン保護回路のトランジスタバージョンよりもはるかに正確に機能することが期待できます。

氏からのフィードバックPrashant Zingade
こんにちはスワガタム、
お元気ですか?あなたのアイデアと論理は素晴らしいです。帽子をかぶって。 IC4049バージョンを試しましたが、1つの問題を除いて正常に動作しています(以前の設計に基づいて1つの変更を行い、現在は動作しています)。
ICバージョンでオートモードにするとドライラン機能が動作しないなどの問題が発生します。添付のシミュレーションビデオファイルをご覧ください。
ケース1:水位が最低レベルを下回る場合、リレーはポンプをオンにしますが、ドライランを感知できず、ポンプはオンを続けます。
ケース2:手動操作では完全に機能します。タイプミスの言い訳。
よろしくお願いします
Prashant P Zingade
回路問題の解決
こんにちはプラシャント、
はい、その通りです。
この状況を修正するには、コンデンサを介してN6の出力をBC547のベースに接続する必要があります。ここで、10uFを接続してみてください。
コンデンサの負の値はベースに向かって進みます。
しかし問題は、この操作はシステムを1回だけアクティブにし、水が検出されない場合、システムはリレーをオフにし、スイッチを使用して手動でアクティブになるまで、および黄色のセンサーが接触するまで、永続的にオフのままになりますもう一度水で。よろしく。
更新
モーターリードスイッチのドライラン保護:設計#3
次の図は、タンク内に水がなく、パイプの出口から水が流出しない場合に、ポンプモーターに追加できる効果的なドライラン保護を示しています。
ここでは、最初に押しボタンを押してモーターを始動します。
1000uFのコンデンサと56kの抵抗は、遅延オフタイマーのように機能し、押しボタンを離した後もトランジスタスイッチをオンに保つため、モーターは数秒間動作し続けます。
この間、パイプの出口から水が流出することが予想され、これにより、ホースパイプの口の近くに導入された小さな容器が満たされます。このコンテナは、フロートマグネットとリードスイッチリレーが内部に配置されているのがわかります。
コンテナ内に水が入り始めるとすぐに、フロートマグネットが上部ですばやく上昇し、リードリレーのすぐ近くに到達してラッチをオンにします。リードリレーはトランジスタのベースに正の電圧を供給し、トランジスタがラッチアップされてモーターが動作し続けるようにします。
ただし、水がない場合、リードリレーフィードバックをオンにすることはできません。これにより、所定の遅延時間の後に遅延オフ時間が経過すると、モーターがシャットダウンします。

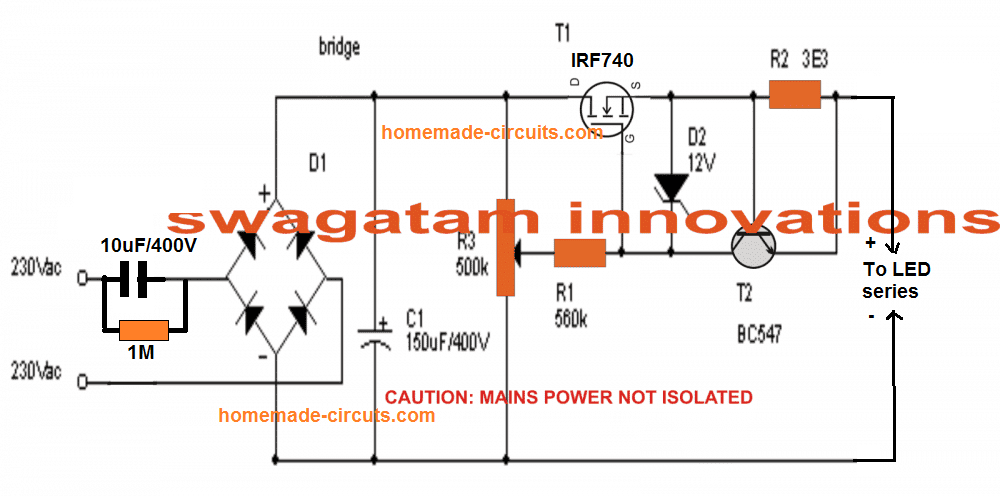
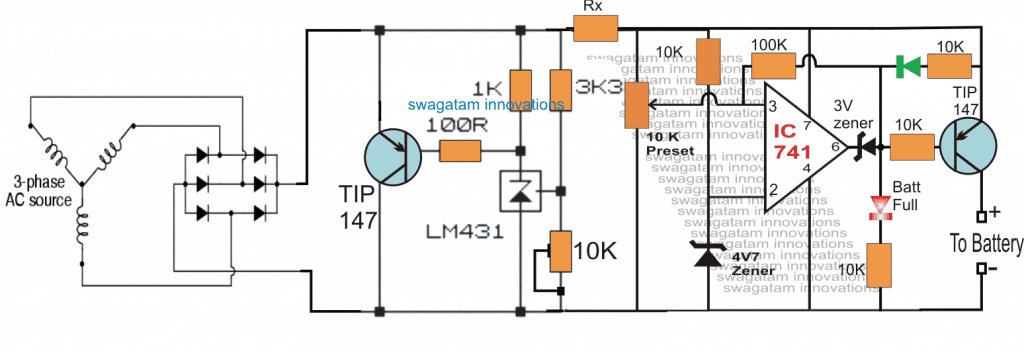
現在検出されているドライランプロテクター回路:設計#4
上記のアイデアでは、回路は主に水の検出に依存しているため、設計は少し時代遅れで面倒です。
上記とは異なり、以下の考え方は、ドライラン保護機能を実行するための負荷検知または電流検知に依存しているため、非接触であり、モーターまたは水と直接接触することに依存しません。

ここでは、2つのトランジスタと関連するコンポーネントが シンプルディレイONタイマー回路 。 SW1がオンに切り替えられると、C1が充電されている間R2を介して来るT1のベースドライブを最初に接地するC1のため、トランジスタT1はオフに切り替えられたままになります。
これにより、T2がオンになり、リレーもオンになります。リレーのN / Oはポンプモーターをオンにします。 C2の値に応じて、モーターはしばらくの間動作することが許可されます。水がない場合、モーターはRXを流れる比較的低い電流で無負荷で動作します。このため、RXはそれ自体に十分な電位を発生させることができず、その結果、オプトカプラーのLEDスイッチがオフになります。これにより、C1は規定の期間中に完全に妨げられることなく充電されます。
C1が完全に充電されるとすぐにT1がオンになり、これによりT2とリレーもオフになります。モーターは最終的に停止され、ドライランの状況からモーターを保護します。
逆に、モーターが通常の水を供給し、通常のポンプを開始すると、モーターに瞬時に負荷がかかり、より多くの電流が消費されます。
抵抗Rxの計算値に従って、これにより、オプトカプラーのLEDをオンにするのに十分な電圧が抵抗Rxの両端に発生します。オプトがアクティブになると、C1の充電が禁止され、遅延オンタイマーが無効になります。リレーはモーターに220Vを供給し続け、水が利用可能である限りモーターを作動させます。
別のシンプルなモータードライランプロテクター回路:設計#5
ここに、ポンプモーターのドライランだけでなく、頭上の水のオーバーフローを実装および制限できる非常に単純なオーバーフローコントローラー回路を説明するさらに別のアイデアがあります。
アイデアはS.R.パランジャペ。
技術仕様
タイマー回路を探しているときにあなたのサイトに出くわしました。一人の人がどれだけできるのか、とても驚きました!
2012年金曜日のあなたの記事を参照します。
私も同様の問題を抱えています。ブレッドボードで動作するように見える回路を設計しました。上部タンクに必要があり、下部タンクに十分な水がある場合にのみポンプを開始したいと思います。さらに、揚水中に下部タンクの水が特定のレベルを下回った場合、揚水を停止する必要があります。
私は私の最後の条件を満たす方法を見つけようとしています。
この回路を手動で開始したいのですが、回路がポンプ動作を停止すると、開始動作も無効になります。これにより、上部タンクへの充填作業が完全に停止します。
どういうわけか、プロジェクト全体のオン/オフ部分での2つのリレー(回路の外側)の組み合わせが機能するはずだと感じています。今のところどこまでわからない。
上の図は私が欲しいものを表現しているかもしれません。プロジェクト/回路は外部ソースから電力を供給されています。回路からの出力(アンピングを停止するために使用される)は、手動でアクティブ化された外部ソースを開く必要があります。
私の問題を提起するためにこの根をとることで私を許してくれることを願っています。私の問題にメリットがあると思ったら、ブログに載せてください。
考案した回路を取り付けています。
自己紹介として-私はシニア(75歳)で、趣味で時間を楽しく使っています。プネ大学統計学教授でした。
私はあなたのプロジェクトを読むのを楽しんでいます。
ありがとうございます
S.R.パランジャペ

デザイン
S.R.さんの努力に感謝します。ただし、Paranjpeは、さまざまな理由により、上記の設計が正しくない場合があります。
正しいバージョンを以下に示します(クリックして拡大してください)。回路の機能は、次の点の助けを借りて理解できます。

ポイント「L」は、下部タンク内の任意のポイントに配置されます。これにより、モーターが許可された動作ゾーンにあるタンクの下部水位が決まります。
端子「O」は、モーターが停止して上部タンクへの充填を停止する上部タンクまたはオーバーヘッドタンクの最上部に固定されています。
基本的なスイッチオン検出は、ベースがポイント「L」に接続されている中央のNPNトランジスタによって実行され、スイッチオフアクションは、ベースがポイント「O」に接続されている下部NPNトランジスタによって実行されます。
ただし、上記の操作は、水自体に正の電位または電圧が供給されるまで開始できません。
“発電機とモーターの違い ”
必要な手動始動機能を容易にするために、要求に応じて押しボタンスイッチが含まれています。
所定の押しボタンを瞬間的に押すと、押しボタンの接点を介して正の電位がタンクの水に入ることができます。
低いタンクレベルがポイント「L」より上であると仮定すると、上記の電圧が水を介して中央トランジスタのベースに到達し、中央トランジスタが即座に導通状態になります。
この中央トランジスタのトリガーにより、モーターとともにリレードライバーステージがオンになり、プッシュボタンを離しても回路とモーターの動作が維持されるようにリレードライバートランジスタもラッチされます。
上記のラッチ状態では、モーターは2つの条件で停止します。水位がポイント「L」を下回るか、オーバーヘッドタンクの上限に達するまで、つまりポイント「O」で水が汲み上げられる場合です。
最初の条件では、リレードライバコレクタからの電圧がポイント「L」に到達するのが禁止され、ラッチとモーターの動作が中断されます。
2番目の条件では、下部のBC547がトリガーされ、中央のトランジスタベースを接地することによってラッチが解除されます。
したがって、頭上水位制御回路は、水位が点「L」以上であるか、点「O」より下である限り、動作し続けることができ、また、初期化は、所与の押しボタンの押し込みにのみ依存するボタン。
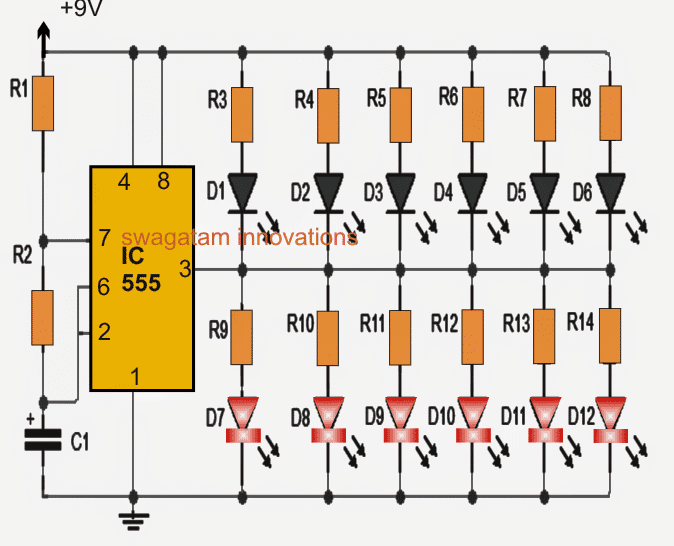
IC555ドライラン保護回路
ドライラン保護は、以下に示すように、既存のIC555ベースのコントローラー回路に追加できます。

上記の設計のドライラン機能は、次のように機能します。
水位が「低レベル」プローブを下回ると、ICのピン#2から正の電位が除去されます。これにより、ピン#2がローになり、すぐにパイ#3がハイになります。
この高信号は、リレードライバステージをオンにする470uFコンデンサを通過し、ポンプモーターがオンになります。
リレードライバとポンプは、470 uFが充電されている間だけオンのままになります。これは、約3〜5秒間かかる場合があります。
この期間内に、ポンプが水を汲み始めた場合、青いワイヤーに接続された水センサーがポンプされた水によって橋渡しされることを可能にします。
関連するBC547はベースバイアスを取得し、470uFのコンデンサをバイパスして導通を開始します。これにより、リレードライバBC547は、満タンのレベルに達するまで自由に導通できます。
一方、水がなく、ポンプが空運転すると、上部BC547にバイアスをかけることができなくなり、最終的に470 uFが完全に充電され、リレードライバステージへのそれ以上のベース電流がブロックされます。このため、リレーはオフになり、ドライラン状態を防ぎます。
前:このTVリモートジャマー回路を作る 次へ:モーターサイクル低バッテリー過放電保護回路