に モーターは電気機器です これは、電気入力を機械的出力に変換します。電気的入力は電流または電圧の形式で、機械的出力はトルクまたは力の形式である可能性があります。 エンジン 固定子と回転子の2つの主要部分で構成され、固定子はモーターの静止部分であり、回転子はモーターの回転部分です。反発の原理で動作するモーターは反発モーターとして知られており、反発は固定子または回転子の2つの磁場の間で発生します。反発モーターは 単相 エンジン。
反発モーターとは?
定義: 反発モーターは、入力AC(交流)を提供することによって動作する単相電気モーターです。反発モーターの主な用途は電車です。反発モーターとして始動し、誘導モーターとして動作します。反発モーターの始動トルクは高く、誘導モーターの運転特性は非常に優れている必要があります。
反発モーターの構築
磁石のN極とS極である極コアからなる単相交流電動機です。このモーターの構造は、単相誘導モーターと同様であり、 DCシリーズモーター。 回転子と固定子は、誘導結合されたモーターの2つの主要コンポーネントです。界磁巻線(または分散型巻線または固定子)は、単相誘導電動機の主巻線に似ています。したがって、磁束が均等に分散され、固定子と回転子の間のギャップが減少し、磁気抵抗も減少します。これにより、力率が向上します。
回転子または電機子は、整流子に接続されたドラムタイプの巻線を備えたDCシリーズモーターに似ており、整流子は短絡されたカーボンブラシに接続されています。ブラシホルダーメカニズムは、軸に沿ったブラシの方向または配置を変更するための可変クランクシャフトを提供します。したがって、このプロセス中に生成されるトルクは、速度の制御に役立ちます。反発モーターのエネルギーは、 変成器 作用または誘導作用(起電力が固定子から回転子に伝達される場合)。

反発モーターコピーの構築
動作原理
反発モーターは、磁石の2つの極が反発する反発の原理で動作します。反発モーターの動作原理は、磁石の位置に応じて、αの3つのケースから次のように説明できます。
ケース(i) : α=の場合 900
ブラシ「CとD」が90度で垂直に配置され、ローターが電流の方向であるd軸(フィールド軸)に沿って水平に配置されていると仮定します。の原理から レンツの法則、 誘導される起電力は、主に固定子磁束と電流方向(ブラシの配置に基づく)に依存することがわかっています。したがって、図に示すように、「CからD」までのブラシの正味起電力は「0」であり、「x」および「。」として表されます。ローターには電流が流れないため、Ir = 0です。電流はローターを通過し、その後、開回路トランスとして機能します。したがって、固定子電流は=未満です。磁界の方向はブラシ軸方向に沿っており、固定子と回転子の磁界軸は180度位相シフトされ、生成されるトルクは「0」であり、モーターに誘導される相互インダクタンスは「0」です。

90度の位置
住宅(ii) : α= 0の場合0
これで、ブラシ「CとD」がd軸に沿って配置され、短絡されます。したがって、モーターに誘導される正味の起電力は非常に高く、巻線間に磁束が発生します。正味起電力は、図に示すように「x」および「。」として表すことができます。これは、短絡した変圧器に似ています。ここで、固定子電流と相互誘導は最大であり、Ir = Is =最大を意味します。この図から、固定子と回転子の磁場の位相が180度反対であることがわかります。つまり、生成されたトルクが互いに反対になり、回転子が回転できなくなります。

α= 0角度
ケース(iii): α= 450の場合
ブラシ「CとD」が一定の角度(45度)に傾いていて、ブラシがショートしている場合。ローター(ブラシ軸)が固定され、ステーターが回転していると仮定します。固定子巻線は有効巻数「Ns」で表され、流れる電流は「Is」です。固定子によって生成される電界は、図に示すように、固定子MMFである「IsNs」の方向にあります。 MMF(起磁力)は2つの成分(MMF1とMMF2)に分解されます。ここで、MMF1はブラシ方向(Is Nf)に沿っており、MMF2は変圧器の方向であるブラシ方向(Is Nt)に垂直です。 'は' IsNt 'と' IsNf 'の間の角度です。したがって、このフィールドによって2つのコンポーネントに生成されるフラックスは、「IsNf」と「IsNt」です。ローターに誘導された起電力は、q軸に沿って磁束を生成します。

傾斜角位置
ブラシ軸に沿ってローターによって生成される場は、数学的に次のように表されます。
Is Nt =IsNscosα………..1
Nt =NsCosα…………2
Nf =NsSinα…………3
磁気軸「T」とブラシ軸はローターと一致するため、ブラシ軸に沿ったMMFは、ステーターによって生成される磁束に等しくなります。

トルク微分
トルクの方程式は次のように与えられます。
Ґα(固定子d軸MMF)*(回転子q軸MMF)……….4
Ґα(IsNsSinα)(IsNscosα)………..5
ҐαI2sN2sSinαcosα[Sin2α=2Sinαcosα]……….6
Ґα½(I 2s N2sSin2α)…….7
ҐαKI2sN2sSin2α[α= 0の場合トルク= 0………。 .8
K =定数値α=π/ 4トルク=最大
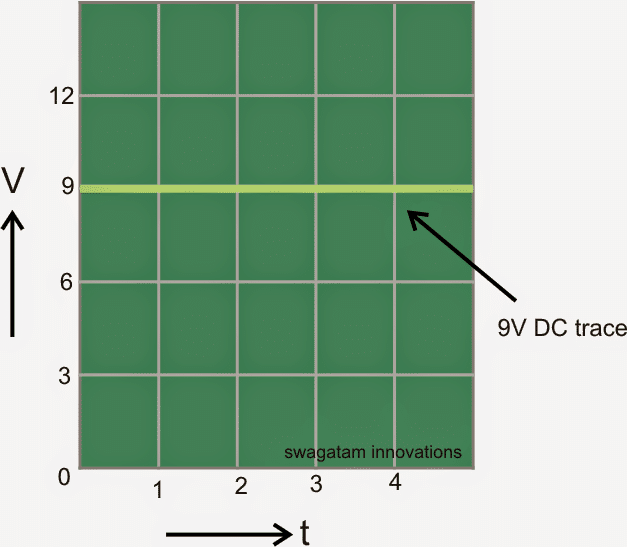
グラフ表示
実際には、これは、x軸が「α」として表され、y軸が「現在」として表されるグラフィック形式で表示できる問題です。

グラフ表示
- グラフから、電流がαに正比例していることがわかります。
- α=の場合、現在の値は0です。 900 これは開回路変圧器に似ています
- 電流はα=のときに最大になります 00 これは、グラフに示されている短絡トランスに似ています。
- ここで、Isは固定子電流です。
- トルク方程式は、ҐαKI2sN2sSin2αとして与えることができます。
- 実際には、αが150〜300の範囲にある場合にトルクが最大になることが観察されています。
反発モーターの分類
反発モーターには3種類ありますが、
補正タイプ
これは、追加の巻線、つまり補償巻線で構成され、追加のブラシのペアが(短絡した)ブラシの間に配置されます。補償巻線と一対のブラシの両方が直列に接続され、電力と速度の要素を改善します。同じ速度で高出力が必要な場合は、補償型モーターを使用します。

補償型反発モーター
反発開始誘導タイプ
それはコイルの反発から始まり、速度が一定に保たれる誘導原理で動作します。 DCアーマチュアと同様の単一の固定子と回転子、および遠心分離機構が整流子バーを短絡し、負荷の電流よりも高いトルク(6倍)を持つ整流子を備えています。反発の動作は、同期速度の周波数が高くなると、全トルク負荷の割合が減少し始め、ある時点で磁極が反発力を受けて誘導モードに切り替わるというグラフから理解できます。ここでは、速度に反比例する負荷を観察できます。

反発-開始-誘導-モーターグラフ
これは、固定子巻線、2つのローター巻線(1つはかご形と他のDC巻線)で構成される反発と誘導の原理に基づいて動作します。これらの巻線は、整流子と2つのブラシに短絡されています。負荷調整が可能で、始動トルクが2.5〜3の状態で動作します。

反発型
利点
利点は
- 始動トルクの値が高い
- 速度は制限されていません
- 「α」の値を調整することでトルクを調整でき、トルクの調整に基づいて速度を上げることができます。
- 位置ブラシを調整することで、トルクや速度を簡単に制御できます。
短所
短所は
- 速度は負荷の変化に応じて変化します
- 高速を除いて力率は小さい
- コストが高い
- 高いメンテナンス。
アプリケーション
アプリケーションは
- これらは、高速機器でトルクを開始する必要がある場合に使用されます。
- コイルワインダー:速度を柔軟かつ簡単に調整でき、ブラシ軸の方向を逆にすることで方向を変更することもできます。
- おもちゃ
- リフト等
よくある質問
1)。反発モーターが反発を経験する角度は何ですか?
45度の角度で、反発が発生します。
2)。反発モーターはどの原理に基づいていますか?
それは反発原理に基づいています
3)。反発モーターの2つの主要なコンポーネントは何ですか?
固定子と回転子は、モーターの2つの主要コンポーネントです。
4)。反発モーターのトルクはどのように制御できますか?
モーターの一次ブラシを調整することでトルクを制御できます
5)。反発モーターの分類
それらは3つのタイプに分類されます
- 反発タイプ
- 反発開始誘導運転モーター
- 補正タイプ
したがって、これは 反発モーターの概要 これは反発の原理に基づいて機能します。固定子と回転子という2つの重要なコンポーネントがあります。モーターの動作原理は、ブラシの位置と生成されるフィールドに基づく角度(0、90、45度)の3つのケースで理解できます。モーターは45度でのみ反発効果を経験します。これらのモーターは、始動トルクが非常に必要な場合に使用されます。主な利点は、ブラシを調整することでトルクを制御できることです。