脈 変調 (PM)は、信号がパルス形式で送信される変調の一種です。このタイプの変調では、連続信号が通常の間隔でサンプリングされるため、この変調技術はアナログ情報を送信するために使用されます。パルス変調は、アナログ変調とアナログ変調の 2 種類に分類されます。 デジタル変調 .アナログ変調は PAM、PWM、PPM の 3 種類に分類され、デジタル変調はパルスコード変調とデルタ変調に分類されます。したがって、この記事では、パルス変調のタイプの1つの概要について説明します。 パルス位置変調 理論またはPPM。
パルス位置変調とは
パルス位置変調は、サンプリングされた変調信号の振幅に基づいてパルスの位置内の変動を可能にするアナログ変調の 1 つのタイプであり、PPM またはパルス位置変調と呼ばれます。このタイプの変調では、 パルスの振幅と幅が安定し、パルスの位置が維持されます 変化しただけ。
PPM 技術を使用すると、各データ パケットがコンピュータに到達するまでの時間を測定するだけで、コンピュータはデータを送信できます。そのため、多経路干渉が少ない光通信でよく使用されます。この変調は完全にデジタル信号を送信し、アナログ システムでは利用できません。ファイルの転送中に効率的ではない単純なデータを送信します。
PPM、PWM、PAM の違いについて詳しく知るには ここをクリック
パルス位置変調のブロック図
PPM 信号を生成するパルス位置変調のブロック図を以下に示します。パルス位置変調信号は、PWM 信号を使用して簡単に生成できることがわかっています。したがって、ここではコンパレータの o/p で、PWM 信号が既に生成されていると想定しており、PPM 信号を生成する必要があります。
上記のブロック図では、PAM 信号が変調器から一度生成され、さらにコンパレータで処理されて PWM 信号が生成されます。その後、コンパレータの出力は、負のエッジでトリガーされる単安定マルチバイブレータに与えられます。したがって、PWM 信号の後縁で、モノステーブルの出力が高くなります。

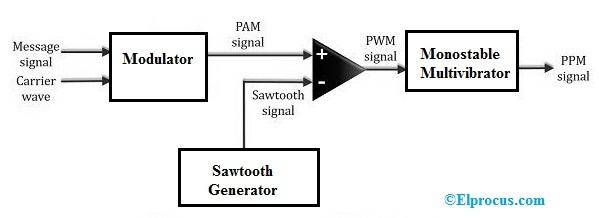
したがって、PPM 信号のパルスは、PWM 信号の立ち下がりエッジによって開始されます。ここで、高出力持続時間は主にマルチバイブレータの RC コンポーネントに依存することに注意してください。これが、PPM 信号の場合に安定した幅のパルスが得られる主な理由です。
PWM 信号の後縁は変調信号を介してシフトするため、このシフトにより、PPM のパルスはその位置内でシフトを示します。 PPM 信号の波形表現を以下に示します。
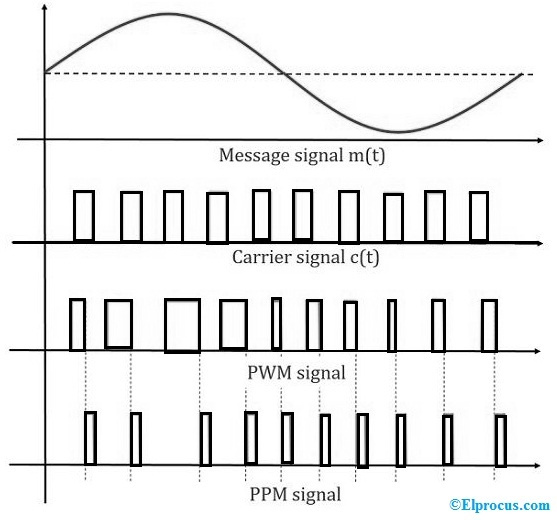
上記のパルス位置変調の波形では、最初の波形がメッセージ信号、2 番目の信号がキャリア信号、3 番目の信号が PWM 信号です。この信号は、最後の図に示されているように、PPM 信号生成の基準と見なされます。上記の波形では、 PWMパルスの終点 同様に PPM パルスの開始点 は一致しており、点線で示されています。
パルス位置変調の検出
パルス位置変調の検出ブロック図を以下に示します。次のブロック図では、パルス発生器、SR FF、基準パルス発生器、および PWM 復調器が含まれていることがわかります。
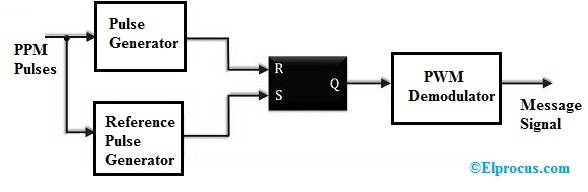
変調回路から送信されるPPM信号は、送信中にノイズで歪んでしまいます。したがって、この歪んだ信号は復調回路に到達します。この回路で使用されるパルス発生器は、固定持続時間のパルス波形を生成します。この波形が SR FF のリセット端子に与えられます。基準パルス発生器は、送信された PPM 信号が与えられると、固定周期の基準パルスを生成します。したがって、この基準パルスを使用して SR FF を設定します。 FF の出力では、これらのセット & リセット信号が PWM 信号を生成します。さらに、この信号は、元のメッセージ信号を与えるために処理されます。
パルス位置変調はどのように機能しますか?
パルス位置変調 (PPM) は、単純なデータを通信するために、電気、光、または電磁パルスをコンピューター/別のデバイスに送信することによって機能します。そのため、パルスがブロードキャストされた時点に基づいてデータをデコードできるように、両方のデバイスを同様のクロックに調整する必要があります。別の方法として、差動パルス位置変調と呼ばれる PPM のもう 1 つの形式を使用すると、放送時間間の相違に応じてすべての信号をエンコードできます。これは、受信デバイスが伝送をデコードするために到着時間の相違のみを監視する必要があることを意味します。
パルス位置変調回路
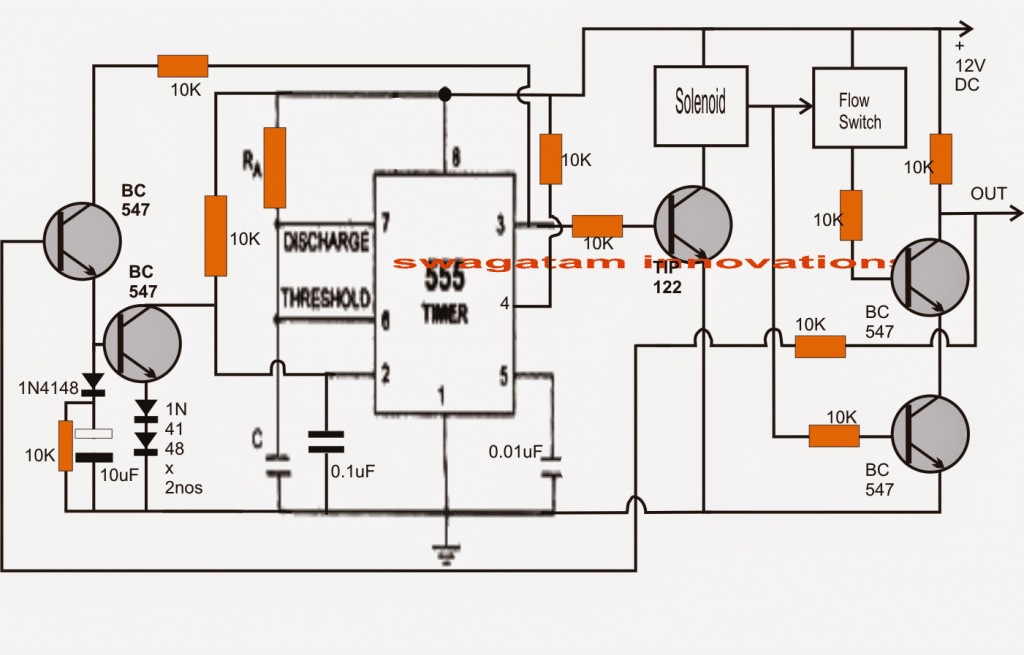
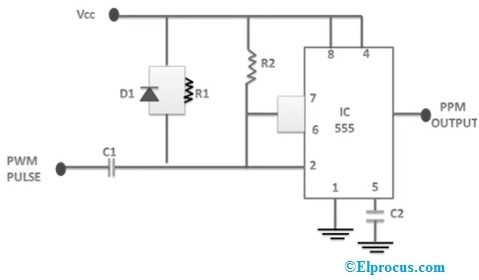
一般に PPM では、パルスの振幅と幅は安定に保たれますが、基準パルス位置を基準とした各パルスの配置は、変調信号の瞬時サンプル値に基づいて変更されます。 555 タイマーを使用したパルス位置変調の回路図を以下に示します。
この回路は、次のようなさまざまな電子部品で構築できます 555タイマーIC 、抵抗器R1およびR2、 コンデンサ C2 & C3 のように、 ダイオード D1.以下に示す回路に従って接続します。
基本的に、 555IC 8 ピン DIP パッケージで提供されるモノリシック IC です。として使用される多くのアプリケーションで使用されます。 非安定マルチバイブレータ と 双安定マルチバイブレータ 三角波、方形波などを生成するためです。PPMの生成も555 ICの応用の一つと考えられています。
上記の PPM 回路と 555 IC を使用して、PPM 信号がどのように生成されるかを見てみましょう。 PWM パルスと PPM パルスの生成では、555 タイマーは単安定モードで動作します。単安定モードは、マルチバイブレータのモードの 1 つです。マルチバイブレータは一般に、1 つまたは 2 つの安定状態を持たない電子回路です。安定状態に基づいて、非安定、双安定、単安定マルチバイブレータの 3 つのタイプがあります。
入力 PWM パルスは、ダイオード D1、抵抗 R、およびコンデンサ C1 によって形成される微分ネットワークを介して、555 IC のようなトリガー入力のピン 2 に適用されます。これで2番ピンの入力を受けて、555タイマーICの3番ピンに出力が得られます。各パルスの幅と振幅が一定に保たれ、出力で PPM 信号が得られるように、出力は抵抗 R2 と C2 によって決定される期間中ハイのままになります。
このように、555 タイマー IC は PPM 信号の生成に使用されます。
利点
の パルス位置変調の利点 以下のものが含まれます。
- PPM は、他の変調に比べて電力効率が最も優れています。
- この変調では、振幅ノイズ干渉が安定しません。
- この変調により、ノイズの多い信号から信号を簡単に分離できます。
- PAM に比べて消費電力が少なくて済みます。
- シグナルとノイズの分離は極めてシンプル
- 一定の送信電力出力があります。
- この手法は、ノイズの多い信号から信号を簡単に分割できます。
- 振幅が大きく持続時間が短いため、PAM や PDM に比べて消費電力が非常に少なくて済みます。
- このタイプのモジュレーションでは、簡単なノイズ除去と分離が非常に簡単です。
- 安定したパルス振幅と幅のため、他の変調と比較して電力使用率も非常に低くなります。
- PPM は、Tx から Rx への単純なコマンドのみを通信するため、システムの必要性が低いため、軽量アプリケーションで頻繁に使用されます。
短所
の パルス位置変調の短所 以下のものが含まれます。
- PPM は非常に複雑です。
- PAM と比較して、送信にはより多くの帯域幅が必要です。
- 各信号の到着時間の差を変えることによって伝送を妨害する可能性があるエコーなどのマルチパスウェイ干渉に非常に敏感です。
- 送信機と受信機の間で同期が必要ですが、これは毎回実現可能ではなく、そのための専用チャネルが必要です。
- この種の変調には特別なデバイスが必要です。
アプリケーション
の パルス位置変調の応用 以下のものが含まれます。
- PPM は、主に通信システムと航空管制システムで使用されます。
- この変調は、無線制御、光通信システム、および軍事アプリケーションで使用されます。
- この技術は、飛行機、リモコンカー、電車などで使用されています。
- PPM は、受信機が PPM を必要としない非コヒーレント検出で使用されます。 フェーズロックループ または PLL を使用して搬送波の位相を追跡します。
- RF(無線周波数)通信で使用されます。
- また、高周波非接触ICカードや無線IDタグなどにも利用されています。
したがって、これはすべてについてです パルス位置変調の概要 – 作業とその応用。ここであなたに質問があります。 PWM ?