
ステッピングモーターは、電力を機械的動力に変換する電気機械装置です。また、全回転を膨大なステップ数に分割できるブラシレス同期電動機です。モーターのサイズがアプリケーションに合わせて慎重に設定されている限り、フィードバックメカニズムなしでモーターの位置を正確に制御できます。ステッピングモーターはスイッチドに似ています リラクタンスモーター。 ステッピングモーターは、磁石の動作理論を使用して、電気のパルスが供給されたときにモーターシャフトを正確な距離だけ回転させます。固定子には8つの極があり、回転子には6つの極があります。ローターは、1回転するために24ステップを移動するために24パルスの電気を必要とします。別の言い方をすれば、ローターはモーターが受け取る電気のパルスごとに正確に15°移動します。
建設と作業の原則
ザ・ ステッピングモーターの構築 にかなり関連しています DCモーター 。それは真ん中にあるローターのような永久磁石を含み、力がそれに作用すると回転します。このローターは、No。その全体に磁気コイルを介して巻かれている固定子の。固定子は回転子の近くに配置されているため、固定子内の磁場が回転子の動きを制御できます。

ステッピングモーター
ステッピングモーターは、すべての固定子に1つずつ通電することで制御できます。したがって、固定子は磁化され、回転子の反発エネルギーを使用して前進する電磁極のように機能します。固定子の代替の磁化と減磁は、回転子を徐々にシフトさせ、優れた制御を介して回転させることができます。
ザ・ ステッピングモーターの動作原理 電磁気学です。固定子が電磁石であるのに対し、それは永久磁石で作られた回転子を含みます。固定子の巻線に電源が供給されると、固定子内に磁界が発生します。これで、モーターのローターがステーターの回転磁界とともに動き始めます。つまり、これがこのモーターの基本的な動作原理です。

ステッピングモーターの構造
このモーターには、電磁固定子で囲まれた軟鉄があります。固定子と回転子の極は、ステッパーの種類に依存しません。このモーターの固定子に電力が供給されると、回転子は回転して固定子と整列します。それ以外の場合は、固定子を通るギャップが最小になるように回転します。このようにして、固定子は直列に作動し、ステッピングモーターを回転させます。
運転技術
ステッピングモーター駆動技術 複雑な設計のため、いくつかの特別な回路で可能です。このモーターを駆動する方法はいくつかありますが、そのいくつかを4相ステッピングモーターの例として以下に説明します。
単一励起モード
ステッピングモーターを駆動する基本的な方法は、単一励起モードです。これは古い方法であり、現在はあまり使用されていませんが、この手法について知っておく必要があります。この手法では、すべての相、そうでなければ互いに隣接する固定子が、特別な回路を使用して1つずつ交互にトリガーされます。これにより、ステーターが磁化および消磁され、ローターが前方に移動します。
フルステップドライブ
この手法では、非常に短い時間で1つではなく、一度に2つの固定子がアクティブになります。この技術は高トルクをもたらし、モーターが高負荷を駆動できるようにします。
ハーフステップドライブ
この手法は、2つの固定子が最初にアクティブになり、3番目の固定子がその後アクティブになるように隣接して配置されるため、フルステップドライブとかなり関連しています。最初に2つの固定子を切り替え、その後に3番目の固定子を切り替えるこの種のサイクルは、モーターを駆動します。この手法により、トルクを減らしながらステッピングモーターの分解能を向上させることができます。
マイクロステッピング
この手法は、その精度のために最も頻繁に使用されます。可変ステップ電流は、 ステッピングモータードライバー回路 正弦波形の形で固定子コイルに向かって。この小さなステップ電流により、すべてのステップの精度を高めることができます。この手法は、高精度を提供するだけでなく、動作ノイズを大幅に低減するため、広く使用されています。
ステッピングモーター回路とその動作
ステッピングモーターの動作は DCブラシモーター 、端子に電圧が印加されると回転します。一方、ステッピングモーターは、中央の歯車の形をした鉄片の周りに複数の歯付き電磁石を効果的に配置しています。電磁石は、マイクロコントローラなどの外部制御回路によって通電されます。

ステッピングモーター回路
モーターシャフトを回転させるために、最初の1つの電磁石に電力が供給されます。これにより、ギアの歯が電磁石の歯に磁気的に引き付けられます。このように歯車の歯が最初の電磁石に位置合わせされた時点で、それらは次の電磁石からわずかにオフセットされます。したがって、次の電磁石がオンになり、最初の電磁石がオフになると、ギアがわずかに回転して次の電磁石と位置合わせされ、そこからプロセスが繰り返されます。これらのわずかな回転はそれぞれステップと呼ばれ、整数のステップが完全に回転します。
このようにして、モーターを正確に回転させることができます。ステッピングモーターは連続的に回転するのではなく、段階的に回転します。 90の4つのコイルがありますまたは固定子に固定された互いの間の角度。ステッピングモーターの接続は、コイルの相互接続方法によって決まります。ステッピングモーターでは、コイルは接続されていません。モーターは90またはコイルに周期的な順序で通電し、シャフトの回転方向を決定する回転ステップ。
このモーターの動作は、スイッチを操作することによって示されます。コイルは1秒間隔で直列に作動します。シャフトは90回転しますまたは次のコイルがアクティブになるたび。その低速トルクは電流によって直接変化します。
ステッピングモーターの種類
ステッピングモーターには主に3つのタイプがあります。
- 永久磁石ステッパー
- ハイブリッド同期ステッパー
- 可変リラクタンスステッパー
永久磁石ステッピングモーター
永久磁石モーターは、回転子に永久磁石(PM)を使用し、回転子PMと固定子電磁石の間の引力または反発力で動作します。
これは、市場で入手可能なさまざまなタイプのステッピングモーターと比較して、最も一般的なタイプのステッピングモーターです。このモーターには、モーターの構造に永久磁石が含まれています。この種のモーターは、ブリキ缶/缶スタックモーターとしても知られています。このステッピングモーターの主な利点は、製造コストが低いことです。革命ごとに、48〜24のステップがあります。
可変リラクタンスステッピングモーター
可変リラクタンス(VR)モーターは、プレーンアイアンローターを備えており、最小リラクタンスは最小ギャップで発生するという原理に基づいて動作するため、ローターポイントはステーターの磁極に引き付けられます。
可変リラクタンスのようなステッピングモーターは基本的なタイプのモーターであり、過去何年にもわたって使用されています。名前が示すように、ローターの角位置は、主に、ステーターとローターの歯の間に形成される可能性のある磁気回路の磁気抵抗に依存します。
ハイブリッド同期ステッピングモーター
ハイブリッドステッピングモーターは、永久磁石(PM)と可変磁気抵抗(VR)技術の組み合わせを使用して、小さなパッケージサイズで最大出力を実現するために名前が付けられています。
最も人気のあるタイプのモーターは ハイブリッドステッピングモーター 永久磁石ローターと比較して、速度、ステップ分解能、保持トルクの点で優れた性能を発揮するためです。しかし、このタイプのステッピングモーターは、永久磁石ステッピングモーターと比較して高価です。このモーターは、永久磁石と可変リラクタンスステッピングモーターの両方の機能を兼ね備えています。これらのモーターは、1.5度、1.8度、2.5度などのより少ないステップ角が必要な場合に使用されます。
ステッピングモーターの選び方は?
要件に合わせてステッピングモーターを選択する前に、モーターのトルク-速度曲線を調べることが非常に重要です。したがって、この情報はモーターの設計者から入手でき、指定された速度でのモーターのトルクのグラフィックシンボルです。モーターのトルク-速度曲線は、アプリケーションの必要性に厳密に一致する必要があります。そうでない場合、期待されるシステムパフォーマンスを得ることができません。
配線の種類
ステッピングモーターは一般に、ユニポーラまたはバイポーラのような2相モーターです。ユニポーラモーターの各相には、2つの巻線があります。ここで、センタータップは、極に向かう2つの巻線の間にある一般的な1本のリード線です。ユニポーラモーターには5〜8本のリード線があります。
2つの極のコモンが分割されているがセンタータップされている構造では、このステッピングモーターには6本のリード線が含まれています。 2極センタータップが内部で短い場合、このモーターには5本のリード線が含まれます。 8リードのユニポーラは直列接続と並列接続の両方を容易にし、5リードまたは6リードのモーターは固定子コイルの直列接続を備えています。ユニポーラモーターの動作は、動作中にバイファイラーモーターと呼ばれる駆動回路内の電流の流れを逆にする必要がないため、簡略化できます。
バイポーラステッピングモーターでは、各極に1つの巻線があります。駆動回路を介して供給方向を変える必要があり、複雑になるため、これらのモーターはユニファイラーモーターと呼ばれます。
クロックパルスを変化させることによるステッピングモーター制御
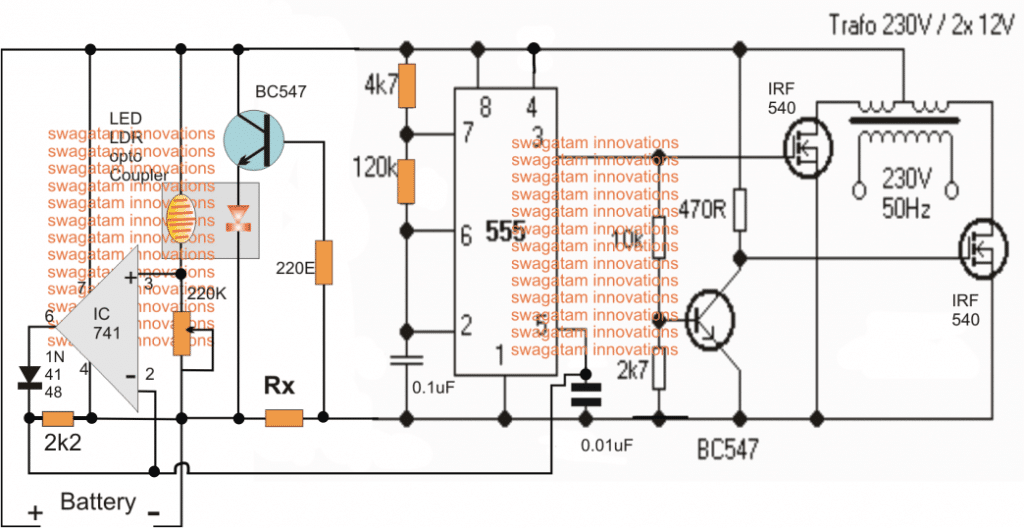
ステッピングモーター制御 回路はシンプルで低コストの回路で、主に低電力アプリケーションで使用されます。安定したマルチバイブレータとして555タイマーICで構成された回路を図に示します。頻度は、指定された関係を使用して計算されます。
周波数= 1 / T = 1.45 /(RA + 2RB)Cここで、RA = RB = R2 = R3 = 4.7キロオームおよびC = C2 = 100 µFです。

クロックパルスを変化させることによるステッピングモーター制御
タイマーの出力は、リングカウンターとして構成された2つの7474デュアル「D」フリップフロップ(U4およびU3)のクロックとして使用されます。電源が最初にオンになると、最初のフリップフロップのみがセットされ(つまり、U3のピン5のQ出力はロジック「1」になります)、他の3つのフリップフロップはリセットされます(つまり、Qの出力はロジックになります)。 0)。クロックパルスを受信すると、最初のフリップフロップの論理「1」出力が2番目のフリップフロップ(U3のピン9)にシフトされます。
したがって、ロジック1の出力は、クロックパルスごとに循環的にシフトし続けます。 4つのフリップフロップすべてのQ出力は、ULN2003(U2)内のダーリントントランジスタアレイによって増幅され、ULN2003の16、15、14、13にオレンジ、茶色、黄色、黒、赤に接続されたステッピングモーター巻線に接続されます。 + ve供給。
巻線の共通点は+ 12V DC電源に接続されており、この電源はULN2003のピン9にも接続されています。巻線に使用されるカラーコードは、メーカーごとに異なる場合があります。電源がオンになると、最初のフリップフロップのSETピンと他の3つのフリップフロップのCLRピンに接続された制御信号がアクティブ「ロー」になります(R1によって形成されるパワーオンリセット回路のため) -C1の組み合わせ)最初のフリップフロップを設定し、残りの3つのフリップフロップをリセットします。
リセット時に、IC3のQ1は「ハイ」になり、他のすべてのQ出力は「ロー」になります。外部リセットは、リセットスイッチを押すことでアクティブにできます。リセットスイッチを押すと、ステッピングモーターを停止できます。リセットスイッチを離すと、モーターは再び同じ方向に回転し始めます。
ステッピングモーターとサーボモーターの違い
サーボモーターは高トルクおよび高速アプリケーションに適していますが、ステッピングモーターは安価であるため、高い保持トルク、低から中程度の加速、オープンまたはクローズドループ操作の柔軟性が必要な場合に使用されます。ステッピングモーターとサーボモーターの違いは次のとおりです。
| ステッピングモーター | サーボモーター |
| 離散的なステップで動くモーターはステッピングモーターとして知られています。 | サーボモーターは、エンコーダーに接続されて速度フィードバックと位置を提供する閉ループモーターの一種です。
|
| ステッピングモーターは、制御と精度が最優先事項である場合に使用されます | 速度が最優先の場合はサーボモーターを使用します
|
| ステッピングモーターの全体的な極数は50から100の範囲です | サーボモーターの全体的な極数は4から12の範囲です |
| 閉ループシステムでは、これらのモーターは一定のパルスで動きます | これらのモーターには、位置を制御するためにパルスを変更するためのエンコーダーが必要です。
|
| トルクは低速で高速です | 高速でトルクが低い |
| 位置決め時間は短いストローク全体で速くなります | 長いストローク全体で位置決め時間が速くなります |
| 慣性の高公差運動 | 慣性の低公差運動 |
| このモーターは、プーリーやベルトなどの低剛性メカニズムに適しています | 剛性の低いメカニズムには適していません |
| 応答性が高い | 応答性が低い |
| これらは変動する負荷に使用されます | これらは変動する負荷には使用されません |
| ゲイン/チューニングの調整は必要ありません | ゲイン/チューニングの調整が必要です |
ステッピングモーターとDCモーター
ステッピングモーターとDCモーターはどちらもさまざまな産業用途で使用されていますが、これら2つのモーターの主な違いは少し混乱しています。ここでは、これら2つの設計に共通するいくつかの特徴を示します。それぞれの特性について以下で説明します。
特徴 | ステッピングモーター | DCモーター |
| 制御特性 | シンプルでマイクロコントローラーを使用 | シンプルで追加の必要はありません |
| 速度範囲 | 200から2000RPMまで低い | 中程度 |
| 信頼性 | 高い | 中程度 |
| 効率 | 低 | 高い |
| トルクまたは速度特性 | より少ない速度での最高トルク | より少ない速度での高トルク |
| 費用 | 低 | 低 |
ステッピングモーターのパラメーター
ステッピングモーターのパラメーターには、主にステップ角度、各回転のステップ、各秒のステップ、およびRPMが含まれます。
ステップ角
ステッピングモーターのステップ角は、ステーターの入力に単一のパルスが与えられたときにモーターのローターが回転する角度として定義できます。モーターの分解能は、モーターのステップ数とローターの回転数として定義できます。
分解能=ステップ数/ローターの回転数
モーターの配置はステップ角で決定でき、度単位で表されます。モーターの分解能(ステップ番号)はnoです。ローターの1回転以内に行われるステップの。モーターのステップ角が小さい場合、このモーターの配置の分解能は高くなります。
このモーターを介したオブジェクトの配置の正確さは、主に解像度に依存します。解像度が高くなると、精度は低くなります。
一部の高精度モーターは、0.36度のステップ角を含む1回転内で1000ステップを作成できます。一般的なモーターには、1.8度のステップ角があり、1回転あたり200ステップです。 15度、45度、90度などのさまざまなステップ角は、通常のモーターでは非常に一般的です。角度の数は2から6まで変更でき、スロット付きポールパーツを使用して小さなステップ角度を実現できます。
各革命のステップ
各分解能のステップは、総回転に必要なステップ角度の数として定義できます。この式は360°/ステップ角です。
毎秒のステップ
この種のパラメータは、主に1秒あたりのステップ数を測定するために使用されます。
1分あたりの回転数
RPMは1分あたりの回転数です。回転数の測定に使用されます。したがって、このパラメータを使用することで、1分間の回転数を計算できます。ステッピングモーターのパラメーター間の主な関係は次のとおりです。
1秒あたりのステップ= 1分あたりの回転数x1回転あたりのステップ数/ 60
8051マイクロコントローラーとインターフェースするステッピングモーター
8051とのステッピングモーターのインターフェースは、ウェーブドライブ、フルステップドライブ、ハーフステップドライブなどの3つのモードを使用することで非常に簡単です。このモーターを実行するために選択する必要のあるドライブモードに基づいて、モーターの4本のワイヤーに0と1を与えます。
残りの2本のワイヤは電圧源に結合する必要があります。ここでは、ULN2003Aを使用して、コイルの4つの端がマイクロコントローラーのポート2のプライマリ4ピンに接続されているユニポーラステッピングモーターが使用されています。
このマイクロコントローラはコイルを駆動するのに十分な電流を供給しないため、電流ドライバICはULN2003Aを好みます。 ULN2003Aを使用する必要があり、これは7ペアのNPNダーリントントランジスタのコレクションです。ダーリントンペアの設計は、最大電流増幅を実現するために接続された2つのバイポーラトランジスタを介して行うことができます。
ULN2003AドライバICでは、入力ピンは7、出力ピンは7で、2つのピンは電源とグランド端子用です。ここでは、4入力ピンと4出力ピンが使用されています。 ULN2003Aの代替として、L293DICは電流の増幅にも使用されます。
2本の一般的なワイヤーと4本のコイルワイヤーを注意深く観察する必要があります。そうしないと、ステッピングモーターが回転しません。これは、マルチメータを介して抵抗を測定することで確認できますが、マルチメータはワイヤの2つのフェーズ間の読み取り値を表示しません。共通線と他の2本の線が同相になると、同様の抵抗を示す必要がありますが、同様の相の2つのコイルの終点は、共通点と1つの端点の間の抵抗と比較して2倍の抵抗を示します。
トラブルシューティング
- トラブルシューティングは、モーターが作動しているかどうかをモーターの状態で確認するプロセスです。次のチェックリストは、ステッピングモーターのトラブルシューティングに使用されます。
- まず、接続と回路のコードを確認します。
- 問題がない場合は、次にモーターに適切な電圧が供給されていることを確認します。そうでない場合は、単に振動しますが、回転しません。
- 電圧供給が良好な場合は、ULN2003AICに関連する4つのコイルの端点を確認します。
- まず、2つの一般的なエンドポイントを見つけて、それらを12v電源に固定します。その後、残りの4本のワイヤをICULN2003Aに固定します。ステッピングモーターが始動するまで、考えられるすべての組み合わせを試してください。これの接続が適切でない場合、このモーターは回転する代わりに振動します。
ステッピングモーターは連続運転できますか?
通常、すべてのモーターは連続的に動作または回転しますが、ほとんどのモーターは電力が供給されている間は停止できません。電力が供給されているときにモーターのシャフトを制限しようとすると、燃焼または破損します。
あるいは、ステッピングモーターは、個別のステップを作成し、そこで再びステップを待って、そこにとどまるように設計されています。モーターを1つの場所にとどめてから再びステップするまでの時間を短縮したい場合は、モーターが連続的に回転しているように見えます。これらのモーターの消費電力は高いですが、消費電力は主にモーターが停止または設計が不十分な場合に発生し、過熱する可能性があります。このため、モーターが長時間保持位置にあると、モーターの電流供給が頻繁に減少します。
主な理由は、モーターが回転すると、その入力電力部分を機械的電力に変更できるためです。モーターが回転しているときに停止すると、コイルの内側ですべての入力電力を熱に変えることができます。
利点
ザ・ ステッピングモーターの利点 以下のものが含まれます。
- 凹凸
- シンプルな構造
- 開ループ制御システムで動作できます
- メンテナンスが少ない
- それはどんな状況でも機能します
- 信頼性が高い
- モーターの回転角は入力パルスに比例します。
- モーターは停止時に最大トルクを持ちます。
- 優れたステッピングモーターの精度はステップの3〜5%であり、このエラーはステップごとに累積されないため、正確な位置決めと移動の再現性があります。
- 開始、停止、および逆転に対する優れた応答。
- モーターに接触ブラシがないため、非常に信頼性があります。したがって、モーターの寿命は単にベアリングの寿命に依存します。
- デジタル入力パルスに対するモーターの応答は開ループ制御を提供し、モーターをより簡単に、より低コストで制御できるようにします。
- シャフトに直接結合された負荷で非常に低速の同期回転を実現することができます。
- 速度は入力パルスの周波数に比例するため、幅広い回転速度を実現できます。
短所
ザ・ ステッピングモーターのデメリット 以下のものが含まれます。
- 効率が悪い
- モーターのトルクは速度とともに急速に低下します
- 精度が低い
- フィードバックは、潜在的な失敗したステップを指定するために使用されません
- 慣性比に向けた小さなトルク
- 非常に騒々しい
- モーターが適切に制御されていない場合、共振が発生する可能性があります
- このモーターの操作は、非常に高速では簡単ではありません。
- 専用の制御回路が必要です
- DCモーターと比較して、より多くの電流を使用します
アプリケーション
ザ・ ステッピングモーターの用途 以下のものが含まれます。
- 産業機械 –ステッピングモーターは、自動車のゲージや工作機械の自動生産設備で使用されています。
- セキュリティ –セキュリティ業界向けの新しい監視製品。
- 医療 –ステッピングモーターは、医療用スキャナー、サンプラーの内部で使用され、デジタル歯科写真、流体ポンプ、呼吸器、および血液分析機械の内部でも使用されています。
- 家電 –自動デジタルカメラフォーカスおよびズーム機能用のカメラのステッピングモーター。
また、ビジネスマシンアプリケーション、コンピュータ周辺機器アプリケーションもあります。
したがって、これはすべてについてです ステッピングモーターの概要 構造、動作原理、違い、長所、短所、およびそのアプリケーションのように。これで、このトピックまたは電気および電気に関する質問がある場合は、スーパーモーターのタイプとそのアプリケーションについてのアイデアが得られました。 電子プロジェクト 以下にコメントを残してください。
フォトクレジット
- ステッピングモーター MST





{kind=link}