変換するマシン 電気エネルギー 機械的エネルギーへの変換は電気モーターと呼ばれます。これらは、設計がシンプルで、使いやすく、低コスト、高効率、低メンテナンス、そして信頼性があります。三相誘導電動機はその種類の1つであり、他の種類とは異なります。 電気モーター 。主な違いは、回転子巻線から電源への電気的接続がないことです。回転子回路に必要な電流と電圧は、固定子巻線からの誘導によって提供されます。これが誘導電動機と呼ぶ理由です。この記事では、三相誘導電動機の一種であるかご形誘導電動機について説明します。
かご形誘導電動機とは?
定義: かご形電動機は、誘導電動機の一種です。動きを発生させるために、電磁気学を強化します。出力軸は、ケージのように見えるローター内部コンポーネントに接続されているため。したがって、それはかご形と呼ばれます。両端のキャップ、つまり円形のキャップは、ローターバーによって結合されています。これらは、EMFに基づいて動作します。つまり、固定子によって生成されます。このEMFは、積層金属シートとワイヤーコイリングで作られた外部ハウジングも生成されます。あらゆるタイプの誘導モーターの2つの主要部分は、固定子と回転子です。かご形は、電磁誘導効果を引き出す簡単な方法です。 4極かご形 誘導電動機 以下に示します。

かご形誘導電動機
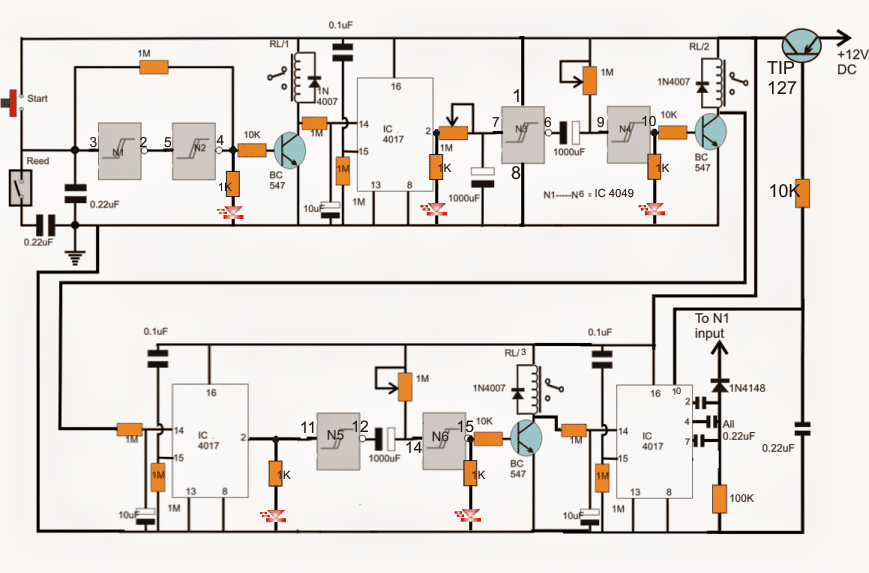
“バッテリー脱硫器の作り方 ”
かご形誘導電動機の動作原理
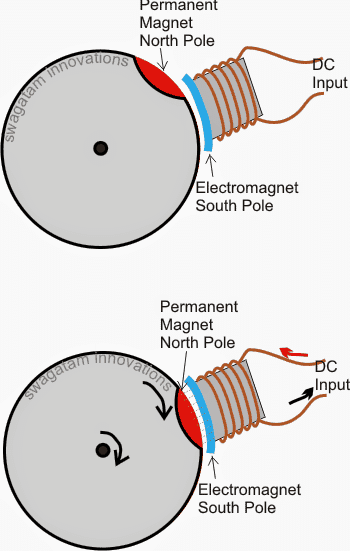
リス誘導電動機の動作は、電磁気学の原理に基づいています。固定子巻線に三相ACが供給されると、同期速度と呼ばれる速度の回転磁界(RMF)が生成されます。このRMFにより、ローターバーに電圧が誘導されます。そのため 短絡 そこに電流が流れます。これらの回転子電流により、固定子磁界と相互作用する自己磁界が生成されます。さて、原理に従って、ローターフィールドはその原因に反対し始めます。 RMFがローターモーメントをキャッチすると、ローター電流はゼロに低下します。その場合、ローターとRMFの間に相対的なモーメントはありません。
したがって、ゼロ接線力はローターによって発生し、一時的に減少します。ローターのモーメントがこのように減少した後、RMFとローターの間の相対運動の再構築によってローター電流が再び誘導されます。したがって、回転に対するローターの接線力が復元され、RMFに従うことから始まります。この場合、ローターは一定の速度を維持します。これは、RMFの速度および同期速度よりも遅くなります。ここでは、RMFとローターの速度の差がスリップの形で測定されます。ローターの最終周波数は、スリップと供給周波数の乗算によって取得できます。
かご形誘導電動機の構造
かご形誘導電動機の構築に必要な部品は、固定子、回転子、ファン、ベアリングです。固定子は、金属製のハウジングとコアを備えた、機械的および電気的に120度離れた三相巻線で構成されています。交流電流によって発生する磁束に対して低磁気抵抗の経路を提供するために、巻線は積層鉄心に取り付けられています。

モーター部品
ローターは、与えられた電気エネルギーを機械的出力に変換します。シャフト、コア、短絡した銅の棒はローターの部品です。電力損失につながるヒステリシスと渦電流を回避するために、ローターは積層されています。そして、私はコギングを防ぐために、導体が歪んでいるので、良好な変態率を与えるのにも役立ちます。

モーター構造
熱交換のためにローターの後ろに取り付けられたファンは、モーターの温度の限界以下に維持するのに役立ちます。スムーズな回転のために、モーターにはベアリングが付いています。
かご形誘導電動機とスリップリング誘導電動機の違い。
| かご形誘導電動機 | スリップリング誘導電動機 |
| シンプルで頑丈なかご形誘導の構造。 | の建設 スリップリング誘導モーター スリップリング、ブラシ、短絡装置などが必要です。 |
| このタイプのモーターは、オーバーハングが少なく、スロットのスペースファクターが優れています。 | これらのモーターは、スロット内のオーバーハングが最も高く、スペースファクターが低くなっています。 |
| コストとメンテナンスが少なくて済みます。 | コストはもっと高いです。 |
| より高い効率(機械の場合、高い始動トルク用に設計されていない) | 低効率とより多くの銅損。 |
| 銅損が少なく、力率が優れています。 | 貧しい 力率 開始時に改善することができます。 |
| ベアエンドリングとローターファンのためのより多くのスペースの利用可能性のために、冷却係数はより優れています。 | 冷却係数はあまり効率的ではありません。 |
| これらのモーターは、より優れた速度調整、簡単な始動、および高い始動電流での低い始動トルクを備えています。 | で外部抵抗を使用して操作した場合の速度調整が不十分 ローター 回路。モーターにはスリップリング、ブラシギア、短絡装置、始動抵抗器などが必要です。ローター回路の外部抵抗により始動トルクが増加する可能性があります。 |
| 始動時に力率が悪い | 力率を改善することができます。 |
| 速度制御の可能性はありません。 | 回転子回路に外部抵抗を挿入することで速度制御が可能です。 |
| 保護に対する防爆。 | 保護に対する防爆。 |
かご形誘導電動機の分類
業界の要件を満たすために、さまざまな標準周波数、電圧、および速度で最大150KWの範囲の三相かご形誘導電動機。これらのモーターは、電気的特性により、以下の6種類に分類されます。
クラスAデザイン
これらのタイプのモーターは、抵抗、リアクタンス、スリップが低く、全負荷での効率が高くなります。主な欠点は、定格電圧で全負荷電流の5〜8倍の高い始動電流です。これらのモーターは、工作機械、遠心ポンプ、ファン、ブロワーなどの小さな定格で広く使用されています。
クラスBデザイン
これらのモーターはリアクタンスが高く、5〜150KWの範囲で動作します。これらのモーターは、クラスAモーターと同様の特性を持ち、同じ凝視電流を持つため、新規設置用にクラスAモーターと交換できます。 (定格電圧での全負荷電流の約5倍)。
クラスCデザイン
これらのモーターは、低い始動電流で高い始動トルクを発揮するダブルケージモーターとして知られています。クラスCモーターの用途は、駆動空気圧縮機、コンベヤー、往復ポンプ、粉砕機、ミキサー、大型冷凍機などです。
クラスDデザイン
これらのモーターは、高抵抗のかご形モーターです。したがって、それらは低い始動電流で高い始動トルクを与えます。これらのモーターは動作効率が低く、パンチプレス、剪断機、ブルドーザー、小型ホイストなどの高加速負荷および高衝撃負荷に伴う断続的な負荷の駆動に制限されています。
クラスEデザイン
これらのモーターは、低い始動トルク、通常の始動電流、および定格負荷での低いスリップで動作します。
クラスFデザイン
これらのモーターは、低い始動トルク、低い始動電流、および通常のスリップで動作します。
利点
かご形誘導電動機の利点は次のとおりです。
- シンプルで頑丈な構造。
- 初期費用とメンテナンス費用が低い。
- 一定の速度を維持します。
- 過負荷容量が大きい。
- 簡単な開始配置。
- 高力率。
- ローター銅損が少ない。
- 高効率。
短所
かご形誘導電動機の欠点は次のとおりです。
- エンジン
- 高い始動電流
- 供給電圧の変動に非常に敏感
- 軽負荷時の力率が低い。
- 速度制御は非常に難しい
- ローター抵抗が低いため、始動トルクが非常に低くなります。
アプリケーション
かご形誘導電動機の用途は以下のとおりです。
- 印刷機、製粉所、その他の小出力のシャフトドライブなど、速度制御が不要な小出力の産業用ドライブに適しています。
- 遠心ポンプ 、ファン、送風機など
- 空気圧縮機、コンベヤー、往復ポンプ、粉砕機、ミキサー、大型冷凍機などの駆動に。
- パンチプレス、鋏、ブルドーザー、小型ホイストなど。
よくある質問
1)なぜかご形誘導電動機と呼ばれるのですか?
かご形誘導電動機と呼ばれるかご形回転子を搭載しています。
2)かご形電動機と誘導電動機の違いは何ですか?
かご形誘導電動機と誘導電動機の違いは、建設に使用するローターの種類です。
3)かご形誘導電動機の目的は何ですか?
モーターの始動トルクを上げ、加速時間を短縮するために使用します。
4)かご形モーターはACまたはDCですか?
ACかご形誘導電動機です
5)モーターがラミネーションを使用するのはなぜですか?
渦電流を低減するために、モーターは積層を使用します。
したがって、これはすべてかご形についてです 誘導電動機 –定義、動作、動作原理、構造、かご形誘導電動機とスリップリング誘導電動機の違い、分類、長所、短所、および用途。ここにあなたへの質問があります、「スリップリング誘導モーターの働きは何ですか?」