
サーボは、システムのパフォーマンスを修正するために使用されるエラー検知フィードバック制御を意味します。また、一般的に洗練されたコントローラー、多くの場合、サーボモーターで使用するために特別に設計された専用モジュールが必要です。サーボモーターは、角度位置の正確な制御を可能にするDCモーターです。歯車によって速度がゆっくりと低下するDCモーターです。サーボモーターは通常、90°から180°まで回転がカットオフされています。いくつかのサーボモーターはまた、360°以上の回転カットオフを持っています。しかし、サーボモーターは常に回転するわけではありません。それらの回転は固定角度の間で制限されます。
サーボモーターは、通常のDCモーター、ギア減速ユニット、位置検出装置、制御回路の4つで構成されています。 DCモーター ほとんどがポテンショメータである位置センサーにフィードバックを提供するギアメカニズムに接続されています。ギアボックスから、モーターの出力はサーボスプラインを介してサーボアームに送られます。標準のサーボモーターの場合、ギアは通常プラスチックで構成されていますが、高出力サーボの場合、ギアは金属で構成されています。
サーボモーターは、アースに接続された黒線、コントロールユニットに接続された白/黄色の線、および電源に接続された赤線の3本の線で構成されています。
サーボモーターの機能は、サーボシャフトの目的の出力位置を表す制御信号を受信し、シャフトがその位置に回転するまでDCモーターに電力を供給することです。
位置検出装置を使用してシャフトの回転位置を把握するため、シャフトを指示された位置に移動するためにモーターをどちらの方向に回転させる必要があるかがわかります。シャフトは通常、DCモーターのように自由に回転することはありませんが、200度回転するだけです。

サーボモーター
“アナログ信号とは ”
ローターの位置から回転磁界を発生させ、効率的にトルクを発生させます。巻線に電流が流れて回転磁界が発生します。シャフトはモーター出力を伝達します。負荷は伝達メカニズムを介して駆動されます。高機能希土類またはその他の永久磁石がシャフトの外部に配置されています。光学式エンコーダは常に回転数とシャフトの位置を監視します。
サーボモーターの働き
サーボモーターは、DCモーター、ギアシステム、位置センサー、および制御回路で構成されています。 DCモーターはバッテリーから電力を供給され、高速かつ低トルクで動作します 。 DCモーターに接続されたギアとシャフトのアセンブリは、この速度を十分な速度とより高いトルクに下げます。位置センサーは、シャフトの特定の位置からの位置を感知し、その情報を制御回路に送ります。制御回路は、それに応じて位置センサーからの信号をデコードし、モーターの実際の位置を目的の位置と比較し、それに応じてDCモーターの回転方向を制御して必要な位置を取得します。サーボモーターは一般的に4.8Vから6VのDC電源を必要とします。
サーボモーターの制御
サーボモーターは、パルス幅変調技術を使用してその位置を制御することによって制御されます。モーターに印加されるパルスの幅は変化し、一定時間送信されます。
パルス幅はサーボモーターの角度位置を決定します。たとえば、パルス幅が1 msの場合、角位置は0度になり、パルス幅が2 msの場合、角幅は180度になります。
利点:
- モーターに重い負荷がかかると、ドライバーはモーターを回転させようとするときにモーターコイルへの電流を増やします。脱調状態はありません。
- 高速運転が可能です。
短所:
- サーボモータは指令パルスに応じて回転しようとしますが遅れるため、精密な回転制御には適していません。
- より高いコスト。
- 停止すると、モーターのローターは1パルス前後に動き続けるため、振動を防ぐ必要がある場合には適していません。
7サーボモーターの用途
サーボモーターは、モーターが過熱することなく速度を急激に変化させる必要があるアプリケーションで使用されます。
- 産業では、工作機械、パッケージング、ファクトリーオートメーション、マテリアルハンドリング、印刷変換、組立ライン、およびその他の多くの要求の厳しいアプリケーション、ロボット工学、CNC機械、または自動製造で使用されます。
- また、ラジコン飛行機でエレベータの位置と動きを制御するためにも使用されます。
- スムーズなオンとオフの切り替えと正確な位置決めにより、ロボットで使用されます。
- また、航空宇宙産業では、油圧システム内の油圧作動油を維持するために使用されています。
- それらは多くのラジコン玩具で使用されています。
- これらは、DVDやブルーレイディスクプレーヤーなどの電子デバイスで、ディスクトレイを拡張または再生するために使用されます。
- また、自動車の速度を維持するために自動車にも使用されています。
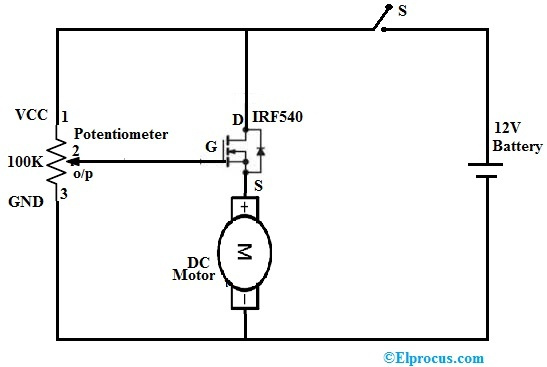
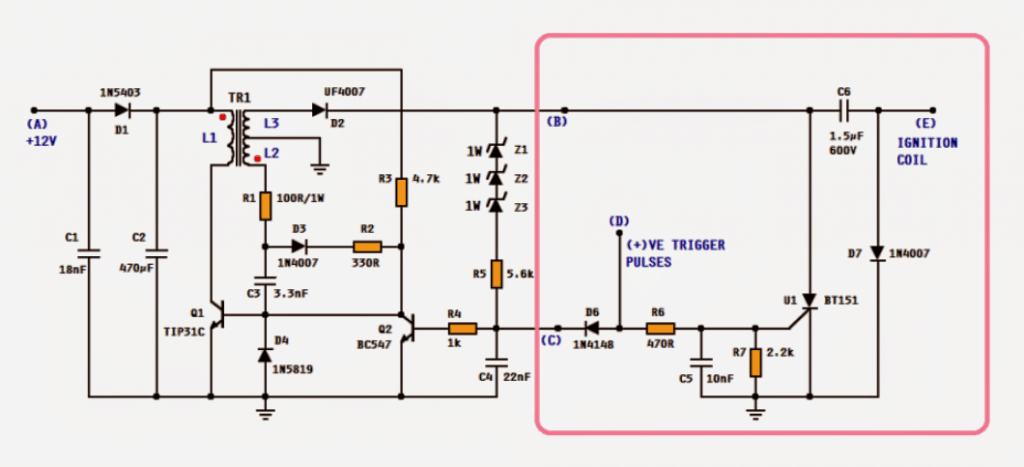
サーボモーターの応用回路
以下のアプリケーション回路から:各モーターには、VCC、グランド、および周期的な方形波信号の3つの入力があります。方形波のパルス幅によって、サーボモーターの速度と方向が決まります。私たちの場合、デバイスが前後に移動し、左右に回転できるように方向を変更する必要があります。パルス幅が一定の時間枠内にある場合、モーターは時計回りに駆動します。パルス幅がその時間枠を超えると、モーターは反時計回りに駆動します。中間の時間枠は、モーター内の内蔵ポテンショメーターを介して調整できます。

ステッピングモーターとサーボモーターの3つの違い:
- ステッピングモーターには、多数の極、永久磁石によって生成される磁気ペア、または電流があります。サーボモーターには極が非常に少なく、各極はモーターシャフトの自然な停止点を提供します。
- 低速でのステッピングモーターのトルクは、同じサイズのサーボモーターよりも大きくなります。
- ステッピングモーターの動作は、パルス発生器から出力されるコマンドパルス信号によって同期されます。対照的に、サーボモーターの動作はコマンドパルスより遅れています。
このトピックについて質問がある場合、または電気および電子プロジェクトが以下のコメントを残している場合は、サーボメーターの動作についてのアイデアがあります。
フォトクレジット
- サーボモーター ウィキメディア








{kind=link}