ロボットはインテリジェントな機械装置であり、最初のロボットは1920年に「チェコの劇作家カレルチャペック」によって構成されました。ロボット工学は、設計、作成、および操作を扱うエンジニアリングの分野です。ロボット工学という言葉は、ロボットという用語に由来しています。現在、シリアルタイプ、パラレルタイプ、ウォーキングタイプ、モバイルタイプのロボットの種類はほとんどありません。ロボット工学の部品は、主に電源、コントローラー、グリッパー、マニピュレーター、およびエンドエフェクターで構成されています。私たちがロボットについて考えるとき、私たちの頭に浮かぶ主な要因は、誰かを模倣することです。ただし、実際には、ロボットの実際の定義はありません。しかし、知能、感知、エネルギー、動きなど、ロボットが持つべき基本的な特性がいくつかあります。一部のロボットは、特定のタスクを実行するために単独で動作します。しかし、代替ロボットは人間の助けを必要としています。結果として、これらのロボットは依存しています。 Robotics Project Ideasは、医療、宇宙通信、 軍事用途
工学部の学生のための最新のロボットプロジェクトのアイデア
今日、何人かの工学部の学生がロボットプロジェクトに大きな関心を示しています。彼らは他と比較して多くの関心を作成します エレクトロニクスプロジェクト 。教育レベルでは、これらのロボット工学プロジェクトは非常に人気があり、ラインフォローロボット、ピックアンドプレースロボット、消防、ウォールトラック、ヒューマノイド、ヘキサポッドなどです。エンジニアリング学生向けのこれらのロボット工学プロジェクトのアイデアは、練習中に役立ちます。 。したがって、私たちは工学部の学生にこれらから選択するようにアドバイスする傾向があります ロボットキット これらはそれらのために動作することができるので。

ロボット工学ベースのプロジェクトのアイデア
暗視無線カメラを使用した戦場スパイロボット
このプロジェクトの主な目的は、RF技術と無線カメラを使用してロボット車両を設計することです。RF技術はリモート操作に使用され、無線カメラは監視目的に使用されます。ロボットとカメラは、暗視機能を備えたビデオを送信できます。このタイプのロボットは、スパイの目的で戦場で役立ちます。アン 8051マイクロコントローラー 目的の操作に使用されます。

暗視無線カメラを備えた戦場スパイロボット
このプロジェクトでは、暗視カメラを使用して暗い場所でも画像をキャプチャし、テレビの受信機にワイヤレスで送信します。これらのロボットは、情報をコントロールユニットに送信したり、敵の土地をスパイしたりするなどの軍事用途で使用されます。このロボットは RF通信を使用して制御 プッシュボタンのセットで。
さらに、このプロジェクトはを使用して設計することができます DTMFテクノロジー 。この技術を利用して、携帯電話を使ってロボット車両を制御することができます。 RF技術と比較して、この技術は長い通信範囲に対して利点があります。
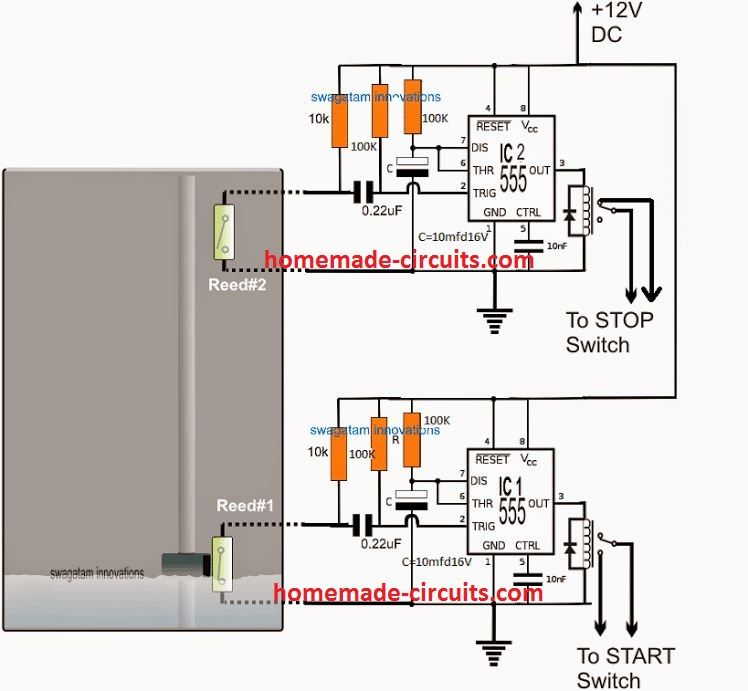
2つの駅間を往復する自動メトロ列車
このプロジェクトの主な目標は、地下鉄の列車の動きで使用された技術を実証することです。このプロジェクトは多くの先進国で使用されています。地下鉄の列車にはコントローラーが装備されており、ある駅から別の駅への列車の自動走行が可能です。

駅間のシャトルへの自動メトロ列車
この オートメトロトレインプロジェクト 自動始動および停止メカニズムで設計されています。地下鉄が特定の時間に停車し、特定の時間後に発車するようにします。ドアを開閉する自動機構を備えており、電車に乗り込む際の人数をカウントします。
ロボット車両の動きを感知するトラック
このプロジェクトの主な目的は、特定の経路を追跡するロボットを設計することです。パスは、白い床の黒い車線にすることができます。トラックセンシングロボット車両は、公共の場所での自動車両のガイドとして、さまざまな用途で使用されています。ここで、このロボット車両は、両方のモーターで感知された湾曲した黒い車線上を移動するように作られた一対のセンサーによって設計されています。

ロボット車両の動きを感知するトラック
このトラックセンシングロボット車両は、2つのモーター、DC電源で構成されています。これらの2つのモーターは、スイッチとして機能するトランジスターによって制御されます。回路の下には、IRLEDとフォトダイオードを含む2つのセンサーが配置されています。 2つのセンサーが白い床を感知すると、モーターはそれに応じて回転します。
回転時に、黒い経路に遭遇すると、モーターの1つがセンサーの入力で回転を停止します。センサーの動作原理は、IR LEDが白い床に光を生成すると、それが反射されることです。反射光がフォトダイオードに当たると、抵抗が減少してモータースイッチの導通を制御します。
金属探知機ロボット車両
このプロジェクトの主な目的は、金属や地雷を検出するためのロボット車両を設計することです。地雷は地下にある不安定な装置であり、金属探知機を使用して手動で検出するのは危険です。このプロジェクトでは、金属探知機がロボットに組み込まれ、RF通信を使用して制御されます。

金属探知機ロボティクスプロジェクトのアイデア
送信機側では、押しボタンの数は マイクロコントローラーに接続 rロボットを特定の動作で実行します。ボタンが押されると、信号がマイクロコントローラーに送信され、マイクロコントローラーがバイナリデータをボタンに送信します。エンコーダはパラレルデータをシリアルデータに変換するために使用され、このコマンドはRFモジュールを使用して送信されます。
受信側では、この信号はデコーダーによってデコードされます。信号に基づいて、マイクロコントローラーはモータードライバーに関連する信号を与えてモーターを駆動します。ロボットが希望の動きで動くようにします。金属探知機はロボット回路に組み込まれており、金属を検出し、ブザーを使用して指示を出します。
レーザービーム配置を備えたRF制御ロボット車両
このプロジェクトは、RF技術を使用してロボット車両を制御するように設計されています。低出力のレーザー光は、そのビームによって遠くの物体を終わらせる可能性を示すためにインターフェースされます。目的の操作には8051マイクロコントローラーが使用されます。

レーザービーム配置を備えたRF制御ロボット車両
送信側では、プッシュボタンを使用して受信者に指示を送信し、ロボットの右、左、前方、または後方への移動を制御します。受信側では、2つのモーターがマイクロコントローラーに接続されており、そこで車両の移動に使用されます。
RF送信機は適切なアンテナで適切な範囲(最大200メートル)の利点を持つRFリモコンとして機能し、受信機は必要な作業のためにモータードライバーICを介してDCモーターを駆動するために別のマイクロコントローラーに供給する前にデコードします。
ロボット本体にはレーザーペンが搭載されており、マイクロコントローラーの出力から送信側からの適切な信号で動作します。使用されるレーザー光は、デモンストレーションのみを目的としており、強力なものではありません。
さらに、このプロジェクトは、 DTMFテクノロジー 。この技術を利用して、携帯電話を使ってロボット車両を制御することができます。この技術は、RF技術と比較して、長い通信範囲よりも優れています。
ロボット車両に続くライン
A-Line Following Robotは、移動する特定のパスをたどるロボットです。パスは、白い床の黒いパスまたは磁場にすることができます。これらのロボットは、公共の場でのガイドから自動車両まで、さまざまな用途で使用されています。ここでは、各モーターのセンサーのペアによって感知される湾曲した黒い経路上を移動するように作られたラインフォローロボット車両が開発されています。ここでは、ロボット車両は2つのモーターで構成されており、各モーターへのDC電源は、スイッチとして機能するトランジスタを使用して制御されます。

ロボット工学プロジェクトのアイデアに従うライン
回路の下には、それぞれIRLEDとフォトダイオードで構成されるセンサーのペアが配置されています。白い床はセンサーによって感知され、モーターはそれに応じて回転します。回転時に、黒い経路に遭遇すると、モーターの1つがセンサー入力で回転を停止します。センサーは、IR LEDからの光が白い表面に当たると反射し、この反射光がフォトダイオードに当たると抵抗を減らしてモータースイッチの導通を制御するという原理で動作します。
障害物回避ロボット車両
ロボットは、それ自体で環境を検出するか、リモートまたはその他の手段を使用して手動で制御することができます。ここでは、周囲の領域を感知して移動する全自動ロボットが開発されています。前方の物体を感知するセンサー装置が埋め込まれているため、ロボットは衝突を避けるために方向を変えます。このようなロボット車両は、サンクチュアリなどの場所で使用できます。

障害物回避ロボット車両
超音波センサーは、障害物の存在を検出するために使用されます。これらのセンサーは、センサーによって受信され、電気信号に変換されるオブジェクトによる超音波の反射の原理に基づいて動作します。したがって、マイクロコントローラは、割り込み信号を受信すると、モータードライバに適切なコマンドを送信して、モーターの1つを停止し、別のモーターを回転させて、ロボットに方向を変えます。
ソフトキャッチグリッパーを備えたピックアンドプレイスロボット車両
ロボット車両を使用して、物体を拾い上げ、それに応じて配置することができます。この目的のために、ロボットは、モーターを使用してそれに応じてモーメントが制御されるエンドエフェクターで構成されています。ロボット車両は、RF通信を使用して一連のボタンによってリモート制御されます。

ロボットのピックアンドプレース
送信機側では、キーパッドがマイクロコントローラーと接続されており、関連するキーが押されると、マイクロコントローラーはそのキーのバイナリコードを生成し、このバイナリコードはシリアル形式に変換され、RFモジュールとRFアンテナを介して送信されます。
レシーバーでは、2つのモーターを使用してロボット車両に関連する動きを与え、別の2つのモーターを使用してグリッパーの動きを制御し、任意のオブジェクトを保持して目的の場所に配置します。送信機から送信されたコマンドはデコードされ、マイクロコントローラーによって使用されて、モータードライバーICに適切な信号を提供します。
消防ロボット車両
ロボットは、火災事故が発生したときなど、多くの危険な状況で使用できます。ここでは、そのようなプロトタイプは、ノズルとポンプを備えた水道管で構成されるデモンストレーションです。ロボットの動き、およびノズルによる水の噴霧は、プッシュボタンのセットを使用してリモートで制御され、コマンドはRF通信を介してロボットに送信されます。

RFベースの消火ロボット車両プロジェクト
店舗管理のためのタッチスクリーンベースの遠隔制御ロボット車両
ここでは、RF通信を使用して制御されるピックアンドプレースロボットが開発されています。タッチスクリーンパネルを使用して、ロボットが送受信するコマンドを送信し、ロボットに目的の方向への適切な動きを与え、ピックアンドプレース操作を制御します。
MATLABを使用したカラーセンシングロボット
このプロジェクトは、MATLABを使用してキャプチャされた画像の色を検出するロボット車両を実装します。このプロジェクトは、画像内の色を検出しながら、人間の労力を軽減するのに非常に役立ちます。このプロジェクトは、MATLABに基づく画像処理技術を使用して実装できます。このロボットには、MATLABを使用した色の検出などの機能がいくつかあり、人の労力を削減して効率的にし、時間を節約できます。
Arduinoベースのスマートフォン制御ロボットカー
このプロジェクトは、Arduinoベースのスマートフォン制御ロボットカーを構築するために使用されます。このAndroid携帯電話制御ロボットは、Bluetoothテクノロジーを使用してロボットを制御します。このプロジェクトで使用される主なコンポーネントは、ロボットカー、Arduino Uno、Androidフォン、およびBluetoothモジュールです。そのためには、Androidモバイルのユーザーは携帯電話にアプリをダウンロードしてインストールしてから、モバイルユーザーはモバイルのBluetoothオプションをオフにする必要があります。
ここでBluetoothは、ロボットの制御において重要な役割を果たす無線通信技術です。ここで、Androidフォンはロボットに接続されているBluetoothへのコマンドを生成します。コマンドは、右、左、前進、後進です。このBluetoothレシーバーはコマンドを取得し、それらをマイクロコントローラーに送信してモーターを管理します。その後、このマイクロコントローラは信号をモータードライバICに送信してモーターをアクティブにします。
Arduinoを使用したロボットプロジェクト
Arduinoベースのロボティクスプロジェクトのアイデアのリストについては、以下で説明します。

Arduinoロボティクスプロジェクトのアイデア
Arduinoを介して動作するロボット芝刈り機
このプロジェクトでは、障害物を避けて庭の特定のエリアの草を刈るロボットを設計します。このロボットは、中央制御装置のようなArduinoコントローラーを使用して太陽エネルギーで操作できます。
Arduinoボードを使用したスマートボートロボット
この単純なロボットプロジェクトは、障害物の検出や光の制御などのためのイノシシを作るためにArduinoボードを使用して設計されています。
Arduinoを使用した光探索用ロボット
このプロジェクトは、ライトフォローロボットを設計するために使用されます。このプロジェクトの制御は、ロボットの干渉なしに光を使用して行うことができます。したがって、この種のプロジェクトは、ライトフォローロボットとも呼ばれます。このプロジェクトは、障害物検出機能を含むArduinoボードを使用して設計できます。
除雪機ロボット
このプロジェクトは、ArduinoUnoを使用した除雪ロボットの設計に使用されます。このロボットは、高周波デバイスから送信されるコマンドを使用して動作します。この装置は、ロボットとプラウの動きを必要な方法で制御するために使用されます。
セルフバランスロボット
このプロジェクトの主な目的は、2つの車輪を含むバランスロボットを設計することです。このプロジェクトは、安定性を得るために個別のデジタル制御用にArduinoで構築できます。
四足ロボット
このプロジェクトは、四足歩行ロボットの設計に使用されます。これは、Arduino Unoコントローラーを介して制御される2つのサーボを含む、シンプルで費用効果の高い四足ロボットです。
Arduinoを使用したロボットマニピュレーター
このプロジェクトでは、人間の腕と同様の機能を持つロボットアームを実装しています。これらの機能は、アームに組み込まれたプログラムによって実現できます。ロボットマニピュレーターの設計は、Arduinoコントローラーを使用して行うことができます。
オムニホイールロボット
このプロジェクトは、オムニホイールロボットを実装します。このロボットは、設計と組み立てが非常に簡単です。この種のロボットは、新しいタイプのアクションを可能にします。このロボットの実装は、モータードライバー回路を介してArduinoボードを使用して行うことができます。
Arduinoを使用したロボット掃除機
このプロジェクトは、自律型掃除機ロボットを設計します。このロボットは、センサー、Arduinoコントローラー、モータードライバー回路を介して人の干渉なしに家を掃除するために使用されます。
未来のためのロボットのアイデア
私たちの日常生活では、ロボットはさまざまな支店でさまざまな目的に使用されています。その中で、日常生活で使用されるロボットは以下のとおりです。日常生活科学プロジェクトにおけるロボットプロジェクトのアイデアのリストは次のとおりです。
- 自動運転ロボット
- 犯罪と戦うためのロボット
- 防衛、セキュリティ、監視におけるロボット
- 教育分野のロボット
- 使用人のようなロボット
- 料理ロボット
- 医療分野のロボット
- 危険な仕事をするためのロボット
- 家のメンテナンス用ロボット
ロボットアームプロジェクトのアイデア
以下のロボティクスプロジェクトのアイデアは、工学部の学生向けにArduinoを使用したロボットアームプロジェクトに基づいています。

アームに基づくロボットプロジェクトのアイデア
ワイヤレスグローブで制御されるロボットアーム
このプロジェクトは、ワイヤレスグローブを使用してロボットの手を制御するシステムを実装します。このプロジェクトは、Arduino Nano、バッテリー、トランシーバーモジュール、サーボモーター、および関連するセンサーを使用して設計できます。
ヌンチャクで制御されるロボットアーム
このプロジェクトでは、ArduinoMegaを使用してロボットアームをプログラムおよびマウントする方法を説明します。このプロジェクトは、任天堂ヌンチュクを使用してロボットアームを制御するため、他のアームベースのプロジェクトとは異なります。見つけるのは非常に簡単で、安価で、センサーのグループが含まれています。
ジェスチャーで制御されるロボットアーム
このプロジェクトでは、手のジェスチャーで制御できるロボットを設計します。ここでは、動的センサーを使用してジェスチャをキャプチャします。ロボットアームの開発は、右腕の肩と手の動きを模倣するサーボモーターを介して行うことができます。
コンピュータマウス制御ロボットアーム
このプロジェクトはロボットアームの設計に使用され、このアームはコンピューターのマウスを介して制御できます。このプロジェクトは、MATLABを使用して独自の決定を行うことにより、画像処理にも使用されます。
Androidアプリ制御ロボットアーム
このプロジェクトは主に、Androidアプリを使用してArduinoとBluetoothモジュールを使用してロボットアームを制御するために実装されています。このプロジェクトに必要なコンポーネントは、DCモーター、Arduinoメガ、およびBluetoothモジュール(HC-05)です。
以下はいくつかの興味深いものです アブストラクトを使用したロボットプロジェクトのアイデア 最終学年の工学部の学生向け。 「abstract」リンクをクリックすると、次のRobotics ProjectIdeasのブロック図の詳細と要約を取得できます。
- レーザービーム配置を備えたRF制御ロボット車両– 概要 。
- ロボット車両に続くライン– 概要 。
- ソフトキャッチグリッパーでピックアンドプレース– 概要 。
- マイクロコントローラーを使用した消防ロボット車両– 概要 。
- 戦場でスパイするためのナイトビジョンワイヤレスカメラを備えたRF制御ロボット– 概要 。
- ロボット車両に続くマイクロコントローラーベースのライン– 概要 。
- 超音波センサーを使用した障害物回避ロボット車両– 概要 。
- 駅間のシャトルへの自動メトロ列車– 概要 。
- IR制御ロボット車両– 概要 。
- 携帯電話制御のロボット車両– 概要 。
- 金属探知機ロボット車両– 概要 。
- 長距離音声認識を備えた音声制御ロボット車両– 概要
- Androidが遠隔操作する消防ロボット– 概要
- IR制御ロボット車両– 概要
ロボット工学に関するミニプロジェクト
ミニロボティクスプロジェクトのアイデアは次のとおりです。これらのロボティクスプロジェクトのアイデアは、工学の初心者だけでなく卒業証書の学生にも非常に役立ちます。

シンプルなロボットプロジェクトのアイデア
爆弾探知ロボット
このロボットは、それぞれの場所で爆弾を検出するために使用されます。このロボットは、PCを使用したワイヤレスRFを介して人が操作できます。ロボットが爆弾を検出すると、ブザー音が鳴り、爆弾内の破壊物質が変化し、周囲に深刻な被害を与える可能性があります。そのために、提案されたシステムには金属探知機回路が含まれています。
リモートで制御されるロボットアーム
このプロジェクトは、リモートを介して制御するロボットアームを実装します。このロボットは、時間を短縮することにより、さまざまな業界の人間の労力を軽減します。これらのロボットは、リモートを介して制御される特定のタスクに使用されます。ここで、このロボットは特定のタスク用に事前にプログラムされています。このプロジェクトでは、リモコンを使用してロボットアームを制御します。送信機から受信した赤外線信号は、基本的なフォトダイオードを使用してIR受信機で検出できます。
リモートフライングロボットを使用したGSM無人航空写真
このプロジェクトは、人間の画像をキャプチャし、防御のためにワイヤレスでオーディオとビデオを介してパーソナルコンピュータに送信するために使用されます。このシステムは、センサーを使用した監視操作に適した軽量で適切なシステムを設計します。
センサーは、下のバランスの取れた領域を画像化するために、最低30メートルの高さで少なくとも2分間高い状態を維持する必要があります。
認識可能なビデオ情報は、観測領域に正しく配置されている地上の受信ポイントに送信する必要があります。使用するセンサーは、上記の条件で物体を認識できる必要があります。このシステムの構成には、センサー、観測、データリンク、データ処理のメカニズム、およびサポートシステムが含まれます。
光学オドメトリによるロボットのナビゲーション
このプロジェクトは、光学オドメトリを使用したナビゲーション用のロボットを設計します。自律移動ロボットが直面する主な問題は、周囲の環境で安全かつ一貫して道を見つける能力です。
ワイヤレス無人タンカーロボット
このプロジェクトでは、ロボット車両に使用される制御システムを設計して、RFおよびPCを介して制御できるようにします。この提案されたシステムでは、ロボットの制御は、赤外線センサーから提供されたフィードバックに基づいて行うことができます。このセンサーは、物体検出回路の重要な部分です。
スワームロボット
これらのロボットは、複数のロボットを使用する人工群知能と連携します。これらのロボットは互いに協調してタスクを完了します。これらのロボットの通信はワイヤレスで行うことができ、それに応じて進みます。このプロジェクトでは、2台のロボットが1台のOSマスターともう1台のスレーブのように設計されていますが、これら2台のロボット間の通信は相互にワイヤレスで行うことができます。ここでは、マスターロボットを使用してミッションを実行しながらスレーブロボットを制御しますが、スレーブロボットはマスターロボットからの受信信号に応じて動作します。
掃除ロボット
このプロジェクトでは、家を清潔に保つためのロボット、つまり掃除ロボットを設計します。このロボットを使えば、ボタンを押すだけで、スマートフォンを使って家の床や壁の掃除を簡単に行うことができます。
卒業証書と工学部の学生のためのロボット工学プロジェクトのアイデア
ロボット工学の分野では、ロボットの設計、操作、建設、構造的配置、製造、および応用に取り組むことが重要です。コンピューター技術を使用すると、適切なハードウェアとセンサーを使用して、制御、感覚フィードバック、および情報処理に取り組むことができます。多くのモーターは、適切なプログラムを備えた専用のマイクロコントローラーを介して制御されるロボット工学で使用されます。したがって、ロボットアプリケーションを設計するには、アセンブリと「C」の言語知識が必須です。
今日、多くの工学部の学生がロボット工学プロジェクトに多くの関心を示しており、他の学生と比較して多くの関心を生み出しています。ラインフォロー、ピックアンドプレイス、消防、ウォールトラック、ヘキサポッド、ヒューマノイドなどのロボットは、学術レベルで人気のあるプロジェクトではありません。
工学部の最終学年の学生向けの最新のロボティクスプロジェクトのアイデアがここにリストされています。
- 超音波障害物感知ロボット車両
- 携帯電話によるロボット車両の動き
- テレビのリモコンで操作するロボット車両
- 加速度計(ジャイロスコープ)制御ロボット
- 無線周波数(RF)制御ワイヤレスロボット
- 話者識別技術を搭載した音声操作ロボット
- コンピューター制御のPicand Place Robot(有線または無線)
- 暗視機能を備えたワイヤレスビデオおよび音声伝送を備えたZigbee制御ボート
- 障害物検出のための人工視覚を備えた自律ロボット
- ワイヤレス制御付きの煙およびLPGガス検知ロボット
- 可視光フォロワーロボット
- Android携帯電話制御Bluetoothロボット
- 暗視無線カメラを備えた無線操作の戦争フィールドスパイロボット
- ビデオカメラ監視システムを備えた飛行クワッドローターチョッパーの建設
- デジタルコンパスとGPSベースの自己ナビゲートロボット
- 爆弾探知ロボット
- 海洋研究アプリケーションのためのDTMFベースの人間のいないロボットボート制御
- Androidスマート携帯電話から制御されるWifiロボット
- ビデオビジョンを備えたワイヤレスルームフレッシュナースプレーロボット
- DTMFベースの携帯電話制御ロボット
- ワイヤレスビデオカメラ付きフライングクワッドロボットチョッパー
- GPSとデジタルコンパスベースのセルフナビゲーションロボット
- PC /ラップトップから制御されるワイヤレスビデオカメラを備えた爆弾置換ロボット
- GSM(SMS)携帯電話制御インテリジェントロボット
- 監視システム用の無線音声および画像伝送ロボット
- 赤外線追跡ロボット(TVリモコン)
- ライブ人間検出および警告ロボット
- 微小電気機械センサー(MEMS)加速度計/ジャイロスコープベースの自己平衡型ロボット
- 携帯電話Bluetooth操作ロボット
- 速度と方向を制御する携帯電話制御の4本足歩行ロボット
- 機械式感知スイッチを備えた障害物検出ロボット
- 超音波センサーを備えた障害物検出ロボット
- PC制御の有線ロボット
- 植栽された地雷の検知を警告する無線操作の戦場ランドローバー
- 堅牢な音声認識を使用した人間とロボットのインターフェース
- PC制御のワイヤレス多目的ロボット
- ウォータージェットスプレー付き無線式消火器ロボット
- リモートコントロールランドローバー
- ロボット制御のワイヤレスオーディオビデオストリーミングカメラ
- サーボモーター制御ワイヤレスビデオカメラ制御システム
- ウォールフォロワーロボット
- 音声制御ワイヤレスエレベーターシステム
- 超音波障害物回避システムを備えた音声認識ロボット
- タッチスクリーン制御のインテリジェントロボット
- 音声操作のインテリジェント消火器車両
さまざまな情報を入手する 工学部の学生のためのマイクロコントローラーベースのロボット工学プロジェクト 。
したがって、これはすべて、Arduino、Mini、Armプロジェクトのアイデア、将来のアイデアなど、さまざまな分野の卒業証書と工学の学生のためのロボットプロジェクトのアイデアのリストです。これらは、最終学年の工学の学生を対象とした興味深い最新のロボットプロジェクトのアイデアです。 。の中に ロボット工学の学術レベル マイクロコントローラーを使用したプロジェクト またはロボットキットは非常に有名です。したがって、これらのロボットプロジェクトは学生にとって非常に役立ちます。これとは別に、これらのプロジェクトに関する質問や 初心者のための簡単なロボットプロジェクト 以下のコメントセクションにコメントすることで、貴重な提案をすることができます。