

産業オートメーションおよび制御
今日では 産業オートメーションシステム 多くの業界で人気があり、いくつかのプロセス関連の操作を制御する上で重要な役割を果たしています。工場や業界に地理的に分散した多種多様な産業ネットワークの実装により、フロアデータの転送および制御機能は、低レベルから高レベルの制御に至るまで、より高度で簡単になりました。これらの産業用ネットワークは、CANプロトコル、Profibus、Modbus、Device netなどのさまざまな通信規格を使用するさまざまなフィールドバスを介してルーティングされます。それでは、CAN通信が産業やその他の自動化のためにどのように機能するかを見てみましょう 自動化ベースのシステム 。
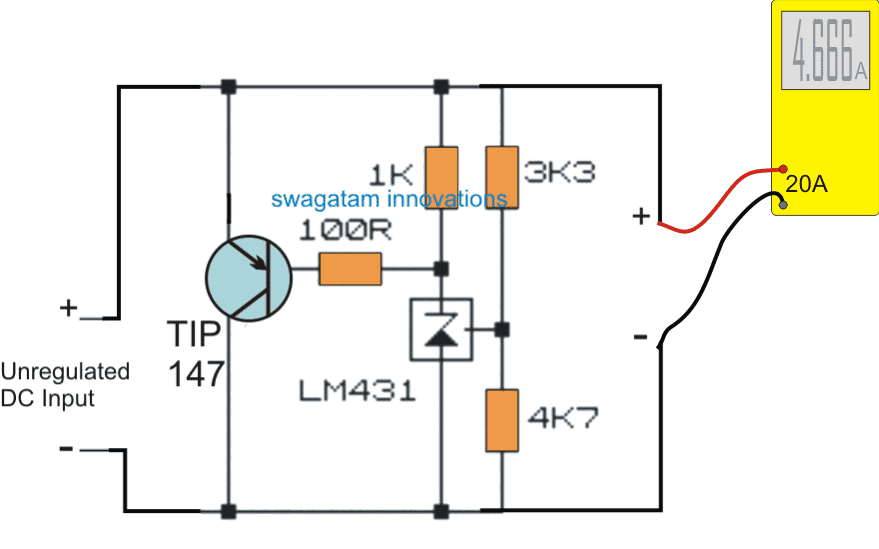
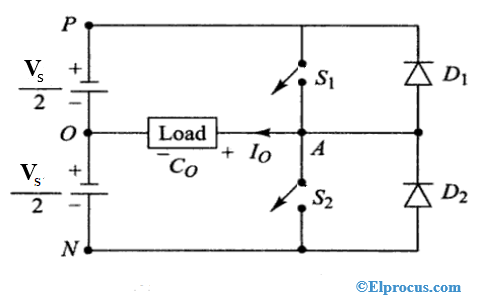
“コンデンサの動作電圧 ”
産業オートメーションおよび制御の概要
次の図は、システム全体を自動化するために3つのレベルの制御が実行される産業用自動化および制御のアーキテクチャを示しています。これらの3つのレベルは、制御と自動化、プロセス制御、および高次制御です。制御および自動化レベルは、プロセス変数を監視および制御するためのセンサーやアクチュエーターなどのさまざまなフィールドデバイスで構成されます。

産業オートメーションアーキテクチャ
プロセス制御レベルは、次のようないくつかの制御デバイスの制御と保守を担当する中央コントローラーです。 プログラマブルロジックコントローラー(PLC) 、およびSCADAやなどのユーザーグラフィカルインターフェイス ヒューマンマシンインターフェース(HMI) このレベルにも含まれます。高次管理レベルは、すべてのビジネス関連の操作を管理するエンタープライズレベルです。
上記の図とそのすべてのレベル、およびその間のレベルを注意深く観察することにより、Profibusや 産業用イーサネット 情報を交換するために接続されていると見なされます。したがって、通信バスは、コントローラ、コンピュータ間、およびフィールドデバイスからのデータの信頼性の高い転送のための産業オートメーションの主要コンポーネントです。
コントロールエリアネットワークまたはCANプロトコル

オープンシステム相互接続(OSI)モデル
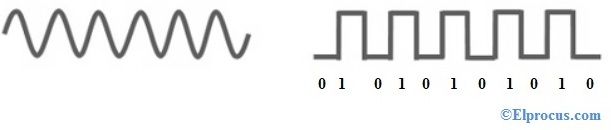
データ通信 あるポイントから別のポイントへのデータの転送です。産業用通信をサポートするために、国際標準化機構は、さまざまなノード間のデータ転送を提供するためのオープンシステム相互接続(OSI)モデルを開発しました。このOSIプロトコルとフレームワークは、製造元によって異なります。 CANプロトコルは、OSIモデルの7つの層のうち、下位2つの層、つまり物理層とデータリンク層を使用します。
コントローラエリアネットワーク、またはCANプロトコルはマルチマスターです シリアル通信バス 、そしてそれは独立したコントローラーのネットワークです。 CANの現在のバージョンは1990年から使用されており、BoschとIntelによって開発されました。最大1Mbpsの伝送速度を提供することにより、ネットワークに存在するノードにメッセージをブロードキャストします。効果的な送信のために、それは信頼できるエラー検出方法に従います–そして、メッセージ優先度と衝突検出に関する調停のために、それはキャリアセンスマルチアクセスプロトコルを使用します。これらの信頼性の高いデータ転送特性により、このプロトコルはバス、自動車、その他の自動車システム、工場および産業用オートメーション、鉱業アプリケーションなどで使用されています。
CANデータ送信
CANプロトコル はアドレスベースのプロトコルではなく、メッセージ指向のプロトコルであり、CANに埋め込まれたメッセージには、転送されるデータの内容と優先度があります。バス上でデータを受信すると、各ノードはデータを破棄するか処理するかを決定します。システムに応じて、ネットワークメッセージは単一ノードまたは他の多くのノードに送信されます。 CAN通信では、特定のノードがRTR(リモート送信要求)を送信することにより、他のノードから情報を要求できます。

CANプロトコルデータ送信
優先度の最も高いメッセージを転送し、優先度の低いメッセージをバックアップおよび待機することにより、データの自動調停なしの送信を提供します。このプロトコルでは、ドミナントは論理0であり、リセッシブは論理1です。1つのノードがリセッシブビットを送信し、別のノードがドミナントビットを送信すると、ドミナントビットが優先されます。優先度ベースのアービトレーションスキームは、2つ以上のデバイスが同時に送信を開始した場合に送信を継続する許可を与えるかどうかを決定します。
CANメッセージフレーム
CAN通信ネットワークは、さまざまなフレームまたはメッセージ形式で構成できます。
- 標準またはベースフレームフォーマットまたはCAN2.0 A
- 拡張フレームフォーマットまたはCAN2.0 B

標準またはベースフレームフォーマットまたはCAN2.0 A
これら2つの形式の違いは、ビットの長さ、つまりベースフレームが識別子の11ビット長をサポートするのに対し、拡張フレームは識別子の29ビット長をサポートすることです。これは18ビットの拡張と11ビットの識別子。 IDEビットはCAN拡張フレームフォーマットとCANベースフレームフォーマットが異なり、IDEは11ビットフレームの場合はドミナントとして送信され、29ビットフレームの場合はリセッシブとして送信されます。拡張フレーム形式をサポートする一部のCANコントローラによって、ベースフレーム形式でメッセージを送受信することもできます。

拡張フレームフォーマットまたはCAN2.0 B
CANプロトコルには、データフレーム、リモートフレーム、エラーフレーム、オーバーロードフレームの4種類のフレームがあります。データフレームには送信ノードデータが含まれますリモートフレームは特定の識別子を要求します送信エラーフレームはノードエラーを検出し、システムがデータまたはリモートフレーム間に遅延を注入すると過負荷フレームがアクティブになります。 CAN通信は、理論的には1つのネットワーク上で最大2032のデバイスをリンクできますが、ハードウェアトランシーバーのため、実際には110ノードに制限されています。ボーレート250Kbps、ビットレート10Kbpsで最大250メートルのケーブル接続をサポートします。最大長は1km、最短は1Mbpsで40メートルです。
CANプロトコルを使用した産業オートメーションと制御
この プロジェクトは、産業を制御するために実装されています プロセスの温度変化に基づいてDCモーターによって実行される負荷。いろいろ プロセス制御システム 温度に依存します。スターラータンクの場合、特定の温度に達した後、スターラーを回転させるためにDCモーターをオンにする必要があるとします。したがって、このプロジェクトは、非常に効率的で信頼性の高い低コストの通信であるCANプロトコルを使用してこれを実現します。
このプロジェクトでは、2つのマイクロコントローラーが使用されています。1つは温度データの取得用で、もう1つは DCモーターの制御 。 CANコントローラーMCP2515とCANトランシーバーMCP2551を両方のマイクロコントローラーに接続して、データ交換用のCAN通信を実装します。

CANプロトコルを使用した産業オートメーションと制御
送信側のマイクロコントローラは、LM35を使用して温度を継続的に監視します 温度センサー ADCを接続してアナログ値をデジタルに変換します。これらの値は、マイクロコントローラにプログラムされた設定値と比較され、マイクロコントローラが送信または送信すると、これらの値に違反します。 データを受信機に送信します CANコントローラーおよびトランシーバーユニットによるサイドマイクロコントローラー。
受信側のCAN通信はデータを受信してマイクロコントローラーに転送し、マイクロコントローラーはさらにデータを処理し、モータードライバーICによってDCモーターを制御します。マイクロコントローラで制御するドライバICでモーターの向きを変えることも可能です。
したがって、CANプロトコルは、産業環境で異なるノードを接続することにより、ピアツーピア通信を可能にします。このタイプの通信は、他の場所でも実装できます。 家や建物のような自動化システム 、ファクトリーなど。この記事がCAN通信による産業オートメーションについての理解を深めてくれることを願っています。詳細および質問については、お問い合わせください。
写真クレジット:






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}