この投稿では、555 ICタイマー回路を介して所定のアルゴリズムを使用して非常に簡単なソーラートラッカー回路を作成する方法を学びます。
前書き
このサイトで私はすでに公開しています ソーラートラッカーシステム回路 これは、太陽電池パネルの面を自動的に調整して、常に入射太陽光線に対して垂直になるようにすることを目的としています。一日中。
ただし、これを実現するには、セットアップ全体に多くの複雑なメカニズムと回路が含まれ、すべての人が組み立てて実装するのは簡単ではない場合があります。
上記の2軸トラッカーによって提供される贅沢のいくつかを犠牲にして無視する準備ができている場合は、おそらく、現在の記事で説明されている概念を使用したいと思うでしょう。
前に説明したソーラートラッカーの投稿には、次の形式のセンサーが含まれていました。 LDR 太陽の「空の位置」を監視し、それに応じて制御回路とモーターにコマンドを提供して、太陽光線でパネルの必要な精度を維持するために必要な調整がパネルにすばやく行われるようにします。
システムにはいくつかの重要な設定と調整が必要ですが、これらが完了すると、残りのすべてが残りの人生を行うのを見るだけで、家の電化に伴う100%の効率が得られます。
“和kマップの積 ”
ここでは、センサーを内蔵しておらず、単軸タイプであるため、非常に簡単かつ迅速に構築できますが、最初は面倒な設定を行い、月に1回程度繰り返していく必要があります。
このシステムの効率は、初期段階では100%である可能性がありますが、元の設定を更新して復元するまで、数週間が経過するにつれて低下し続けます。
これは、年間を通じて太陽の日の出/日の入りの位置の変化に対応して行う必要があります。
コンセプトが機能するように設計されている方法
ここで説明する単軸ソーラートラッカー回路について説明しましょう。コンセプトはすべて、回路に一種のプリミティブアルゴリズムを実装することです。
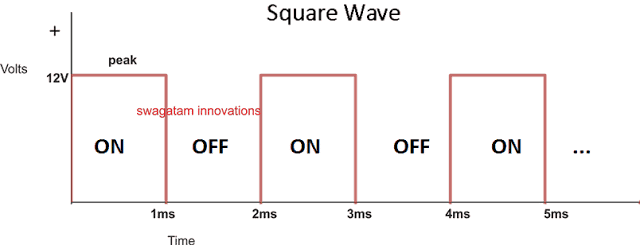
コンセプトは単純です。太陽がアクティブなままであるか、空の上に住んでいる平均時間を書き留めるだけです。
次に、モーターの速度を調整して、パネルが日の出から日没まで、回転中に太陽にほぼ面して回転するようにします。
このようにしてモーターの速度が調整され、パネルが規定の期間全体で約50〜60度の角度で移動し、太陽の軌跡をたどることを模倣します。
モーター速度の調整に使用する回路は明らかにPWM回路であり、使用するモーターはステッピングタイプのモーターでも、通常のブラシレスタイプでもかまいません。
システムを可能な限り効率的にするために、日照時間に応じた速度の調整を何日にもわたって最適化する必要があります。
将来の季節を監視せずに同じ設定を適用できるように、速度の設定の日付と関連性を記録に書き留めておく必要があります。
次の図は、提案されたシステムに使用できる単純なモーターとギアのメカニズムを示しています。青い色のプレートはソーラーパネルで、大きい方のギアの中央ロッドで固定されています。
下部フレームは地面にしっかりと固定する必要があります。
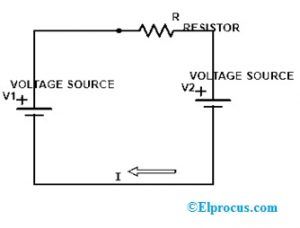
“最大電力伝達定理pdf ”
PWMアルゴリズムコントローラー
次の設計は、提案された単軸ソーラートラッカーのモーター制御モジュールを示しています。これには、安価な555ICとその他の重要な半導体部品で作られた単純な回路が含まれています。ポットP1は、回路が覆われる可能性のあるエンクロージャの外側に取り付ける必要があります。
P1は、パネルの回転が太陽の「動き」とほぼ同期したままになるように、1年のさまざまな季節にモーター速度を調整するために使用できる主要なコンポーネントです。
実際、モーターが一定の速度で動作するように、P1を非常に注意深く調整する必要がある場合があります。
ギア機構は、パネルの面を1日を通して太陽に対してほぼ垂直に保つために、小さいギアと大きいギア直径がパネルに対して一定の角度の動きを生成するように配置する必要があります。
P1の設定は、1年のさまざまな月に対応して設定が更新されるたびに書き留めておく必要があります。その後、このデータは将来にわたって繰り返される可能性があります。
パーツリスト
- R1 = 10K
- P1 = 220K
- すべてのダイオード= 1N4148
- T1 = 30V、10アンペアMOSFET
- IC = 555、
- C1 = 5nF
- C2 = 10nF
- C3 = 100uF / 25V
前:電圧安定装置用の主電源AC過負荷保護回路 次へ:15分でバッテリー充電器を作る