
CANまたはコントローラーエリアネットワークは、2線式半二重高速シリアルネットワークテクノロジーです。これは基本的に、自動車などの低半径領域のさまざまなデバイス間の通信に使用されます。 CANプロトコルは、CSMA-CD / ASMプロトコル、またはメッセージ優先プロトコルでのキャリアセンスマルチアクセスコリジョン検出アービトレーションです。 CSMAは、各ノードがメッセージを送信する前に特定の期間待機する必要があることを確認します。衝突検出は、指定された優先度に基づいてメッセージを選択することにより、衝突が回避されることを保証します。
125kbpsから1Mbpsの信号速度を提供します。 2048の異なるメッセージ識別子を提供します。
これはISO-11898標準であり、7層のオープンシステム相互接続モデルを利用します。
歴史:
1982年にロバートボッシュによって開発され、1986年にデトロイトの自動車技術者協会によって正式にリリースされました。CANバスを統合した最初の自動車は、1992年にメルセデスベンツによって製造されました。
ISO 11898アーキテクチャ:

画像ソース– テレミノ
階層化アーキテクチャは3つの層で構成されています
- アプリケーション層 :オペレーティングシステムまたはCANデバイスのアプリケーションと相互作用します。
- データリンク層 :データの送信、受信、検証の観点から、実際のデータをプロトコルに接続します。
- 物理層 :実際のハードウェアを表します。
標準のCANフレームは、次のビットで構成されています。
 標準のCANフレームは、次のビットで構成されています。
標準のCANフレームは、次のビットで構成されています。
- SOF-神父の始まり アメ。メッセージはこの時点から始まります。
- 識別する :メッセージの優先度を決定します。バイナリ値が低いほど、優先度は高くなります。 11ビットです。
- RTR –リモート送信要求。別のノードからの情報が必要な場合に支配的です。各ノードはリクエストを受信しますが、識別子がメッセージの識別子と一致するノードのみが必要なノードです。各ノードも応答を受信します。z
- ここに –単一の識別拡張。それが支配的である場合、それは拡張子のない標準のCAN識別子が送信されていることを意味します。
- R0 –予約ビット。
- ダウンロードコンテンツ –データ長コード。送信されるデータの長さを定義します。 4ビットです
- データ –最大64ビットのデータを送信できます。
- CRC –巡回冗長検査。これには、エラー検出のための先行するアプリケーションデータのチェックサム(送信されたビット数)が含まれます。
- ALAS - 認める。 2ビット用です。正確なメッセージが受信された場合に支配的です。
- EOF –フレームの終わり。缶フレームの終わりを示し、ビットスタッフィングを無効にします。
- IFS –フレーム間スペース。これには、コントローラーが正しく受信したフレームを適切な位置に移動するために必要な時間が含まれています。
5つの異なるメッセージタイプは次のとおりです。
- データフレーム :任意のフィールド、データフィールド、CRCフィールド、および確認応答フィールドで構成されます。
- リモートフレーム :他のノードからのデータ送信を要求します。ここでは、RTRビットは劣性です。
- エラーフレーム :エラーを検出すると送信されます。
- オーバーロードフレーム :メッセージ間の遅延を提供するために使用されます。ノードがビジーになりすぎると送信されます。
- 有効なフレーム :EOFフィールドが劣性である場合、メッセージは有効です。それ以外の場合、メッセージは再度送信されます。
CAN物理層:
CANバス

画像ソース– digital.ni
これは、CAN_HとCAN_Lの2線式シリアルリンクで構成されており、それらの相対的な電圧レベルによって、1または0のどちらが送信されるかが決まります。これは差動シグナリングです。各信号線を流れる電流は同じですが方向が逆であるため、低ノイズ放射の鍵となるフィールドキャンセル効果が得られます。これにより、バランスの取れた差動信号が保証され、ノイズ結合が減少し、ワイヤを介した高速伝送が可能になります。通常、ワイヤはバス長40 m、最大30ノードのツイストペアケーブルです。これは、120オームの特性インピーダンスを持つシールドケーブルまたは非シールドケーブルです。
CANトランシーバー:

HugoProvencherによる車両用のCAN。 CANHとCANLの2本のワイヤは通常2.5Vで、2つのトランジスタと2.5Vの電圧源によって決定されます。基本的に、2本のワイヤーの差は常に0である必要があります。ドライバーコントロールは、CANHおよびCANLワイヤーに印加される電圧を決定します。両方のトランジスタが導通している場合、1の両端の電圧降下stトランジスタとダイオードは1.5Vで、CANHワイヤを3.5Vまで引き上げます。 2の両端の電圧降下ndトランジスタとダイオードは1Vで、CANLワイヤを1.5Vにプルダウンします。ダイオードは高電圧保護に使用されます。受信機は、2つの入力CANHとCANLが同じ場合は1の出力を、2つの入力が異なる場合は0の出力を与える弁別回路です。 TXDドミナントブロックは地絡保護に使用され、サーマルシャットダウンブロックは、ダイオードとトランジスタが過熱した場合にドライバ制御を無効にします。
CANの利点:
- 分散制御であるため配線が削減され、システムパフォーマンスの向上が保証されます。
- 多くのCANチップメーカーは、チップに接続されたデータリンク層と物理層を提供しており、ソフトウェア開発者が行う必要があるのは、アプリケーションコーディングを開発することだけです。
- さまざまな電気環境で動作する機能を提供し、ノイズのない伝送を保証します。
- メッセージは優先度に基づいて送信されるため、トラフィックの輻輳が解消され、ネットワーク全体がタイミングの制約を満たすことができます。
- 各ノードがメッセージの送信中にエラーをチェックし、エラーフレームを送信できるため、エラーのない送信が可能になります。
CANの実例:
コントローラのエリアネットワークは、産業用だけでなく車両にも幅広い用途があります。主要なアプリケーションの1つは、車両内のさまざまなデバイス間の通信に関係しています。もう1つは、パスワードを検出するために使用されるさまざまなマイクロコントローラーの中にあり、パスワードを使用してロックされたドアを開けたり、電球をオンにしたりするなどの要件を満たすために使用されます。

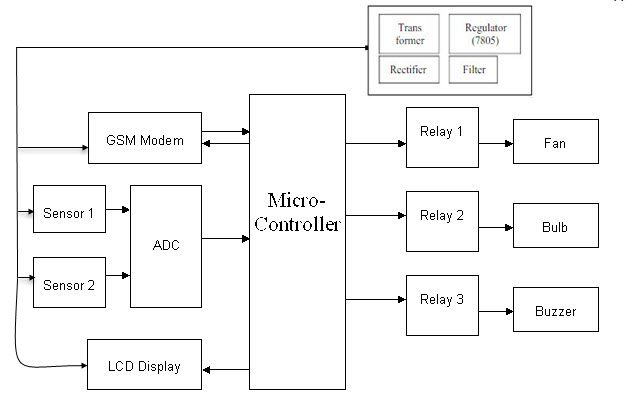
コントローラエリアネットワーク回路
基本的なアプリケーションは、CANネットワークのように2本のワイヤーを使用して相互に通信する3つのマイクロコントローラーで構成されています。 1stマイクロコントローラーはキーパッド、2と接続されていますndLCD付き、3番目はブザーとランプを操作するリレー付き。キーパッドにパスワードを入力すると、2ndマイクロコントローラは受信機として機能し、送信されたメッセージを1から少しずつ受信します。st送信機とLCDにメッセージを表示します。メッセージ全体が送信されると、2ndマイクロコントローラーが検証を行い、パスワードが間違っている場合は、3に信号を送信しますrdこの信号でブザーを送信するマイクロコントローラーがオンになります。パスワードが正しければ、3rdマイクロコントローラーがリレーをオンにし、リレーがランプをオンにします。









{kind=link}
{kind=link}